
基于PID控制器的四旋翼无人机控制系统的simulink建模与仿真,并输出虚拟现实动画
目录
1.课题概述
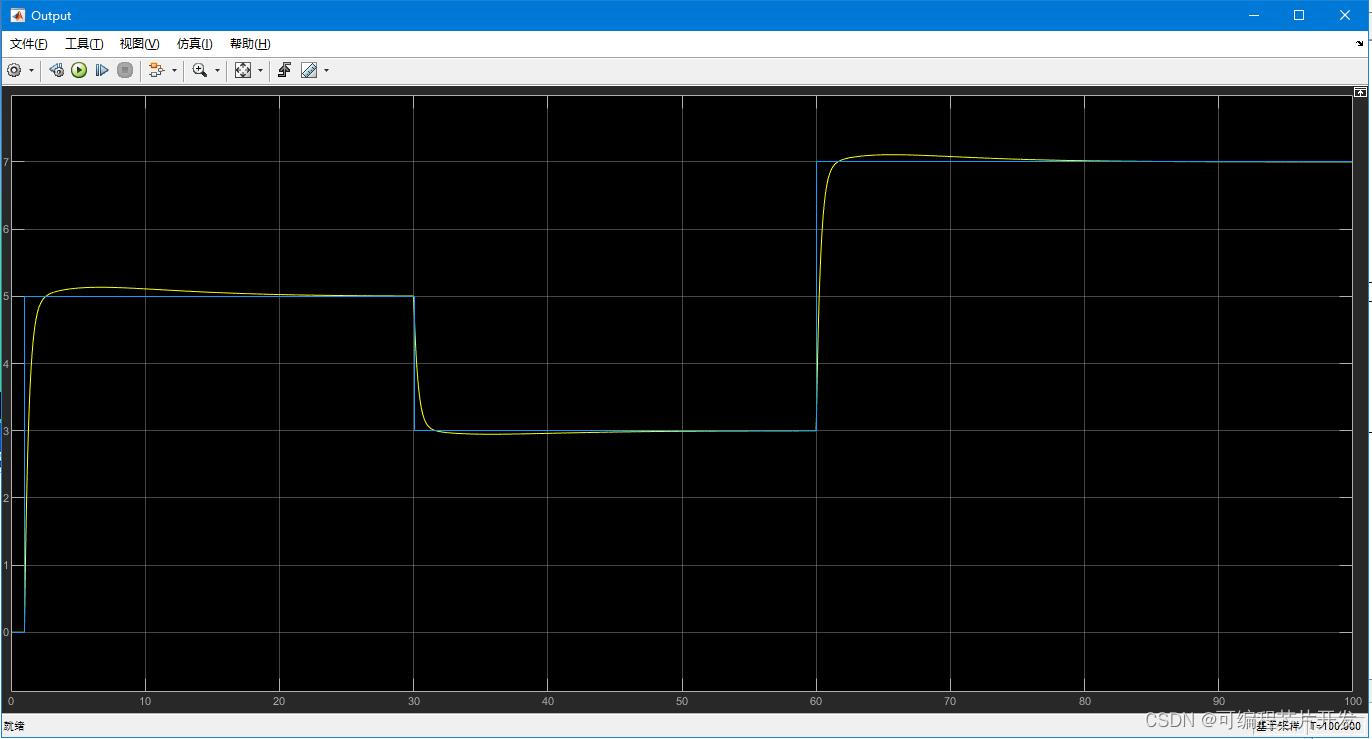
2.系统仿真结果
3.核心程序与模型
4.系统原理简介
4.1四旋翼无人机的动力学模型
4.2 PID控制器设计
4.3 姿态控制实现
4.4 VR虚拟现实动画展示
5.完整工程文件
1.课题概述
基于PID控制器的四旋翼无人机控制系统的simulink建模与仿真,并输出vr虚拟现实动画,输出PID控制器的控制反馈曲线。整个仿真过程,无人机为升空,下降,再升空的飞行效果。
2.系统仿真结果

3.核心程序与模型
版本:MATLAB2022a

39
4.系统原理简介
4.1四旋翼无人机的动力学模型
四旋翼无人机的动力学主要体现在其姿态控制上,每个旋翼产生的升力可以通过改变电机转速来调整。对于三维空间中的姿态控制,通常使用欧拉角(pitch, roll, yaw)来描述无人机的姿态,其动力学方程可以用以下矩阵形式表示:

其中:
- q 是四旋翼无人机的欧拉角矢量;
- M 是惯性矩阵;
- C(q,q˙) 是哥氏矩阵,反映了角速度对转动惯量的影响;
- G(q) 是重力项;
- τ 是旋翼产生的总扭矩矢量。
4.2 PID控制器设计
PID控制器用于实时调整各个电机转速以维持无人机的姿态和位置稳定。对于任意一个姿态角 θ,对应的PID控制器输出 u 可以表示为:

- e(t) 是当前姿态角的实际值与设定值之差,即误差信号;
- KP 是比例增益,KI 是积分增益,KD 是微分增益。
4.3 姿态控制实现
针对无人机的俯仰、滚转和偏航三个自由度,分别设计PID控制器,使得无人机能够快速响应并消除姿态误差。例如,对于偏航角的控制,PID控制器会根据偏航角误差来调整左右两个对角线上的电机转速差异。
4.4 VR虚拟现实动画展示
在VR环境中,可以将无人机的实时状态数据映射到虚拟场景中,从而创建出逼真的飞行动画。通过编程将PID控制器计算得到的各电机转速转换成无人机的位置、速度和姿态信息,进而驱动虚拟四旋翼无人机模型在VR空间中按照真实的物理规律进行运动。
总结来说,基于PID控制器的四旋翼无人机控制系统首先运用飞行力学模型描述无人机的动力学行为,然后通过PID控制器对各个姿态角进行精准控制,最后在VR环境中将控制结果转化为直观的视觉体验,使用户能够在虚拟现实中观察和理解无人机的飞行控制机制。如果需要更深入的理解,建议配合相关的图形化表示和实例代码进行学习。
5.完整工程文件
v
v



