
ROS2创建自定义数组类消息并进行发布
说明
自定义创建一个数组类型的消息,使用python创建ROS2节点,并将消息进行发布
参考链接:https://blog.csdn.net/qq_32618327/article/details/128793362
1.创建自定义消息
初始化工作空间
mkdir -p myros_ws/src
1.1 创建自定义消息
创建独立的功能包来保存自定义消息,自定义消息的说明如下:
- 发布的topic是一个包含了多个元素的数组,针对同一次输入有多个格式相同的输入(如同一张图像有多个目标检测结果)
- 每个数组元素包含多个数据类型
cd myros_ws/src ros2 pkg create --build-type ament_cmake box_interfaces cd box_interfaces/ mkdir msg && cd msg touch Box3d.msg Box3dArray.msg
创建成功会有LOG打印:
将以下内容添加到对应的消息文件:
# Box3d.msg是一个基础的检测框的信息,包括了检测目标的类别、得分、中心点位置、长宽高、yaw角等信息
# Box3d.msg int8 class_id float32 score geometry_msgs/Point center float32 dx float32 dy float32 dz float32 yaw
Box3dArray.msg是一个数组类消息,用于存放同一帧数据的多个检测结果,数组中的数据类型是上面定义的OBJBox3d,数组的名词为obj_box3d_array
# Box3dArray.msg std_msgs/Header header Box3d[] obj_box3d_array
1.2 修改CMakeLists.txt和package.xml
在CMakeLists.txt的 find dependencies下添加相应的依赖和自定义消息目录
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(geometry_msgs REQUIRED)
find_package(rosidl_default_generators REQUIRED)
rosidl_generate_interfaces(${PROJECT_NAME}
"msg/Box3d.msg"
"msg/Box3dArray.msg"
DEPENDENCIES geometry_msgs
)
在package.xml中添加相应依赖
rosidl_default_generators
rosidl_interface_packages
ament_cmake
rclpy
std_msgs
geometry_msgs
message_generation
message_runtime
2.创建发布者
2.1 创建发布者并编写发布节点
cd myros_ws/src # 初始化发布者的package,ament_python表示使用python编码,pub_box3d表示package的名字 ros2 pkg create --build-type ament_python pub_box3d
package创建后终端会有日志进行打印

编写发布者代码,在myros_ws/src/pub_box3d/pub_box3d目录下新建一个文件publish_box3d.py
import rclpy
from rclpy.node import Node
from std_msgs.msg import Header
from std_msgs.msg import String
# 引用自定义的消息格式,Box3d, OBJBox3dArray即消息文件名
from box_interfaces.msg import Box3d, Box3dArray
# 创建一个发布器节点类
class MinimalPublisher(Node):
'''
发布器节点类
'''
def __init__(self):
# 初始化节点名、发布器、每0.5s回调的定时器和计数器
super().__init__('minimal_publisher')
# 创建发布者,发布的TOPIC类型为Box3dArray,名称为'/velodyne/box3ds'
self.publisher_ = self.create_publisher(Box3dArray, '/velodyne/box3ds', 10)
# 为了测试添加定时器,实际上发布频率会由数据频率和处理速度控制
timer_period = 0.5
self.timer = self.create_timer(timer_period, self.timer_callback)
self.i = 0
def timer_callback(self):
'''
定时器回调函数
'''
# 声明一个OBJBox3dArray消息,并初始化Header
header = Header()
now = self.get_clock().now().to_msg()
header.stamp = now # 获取当前时间戳
header.frame_id = "velodyne" # 设置frame_id,这里只是一个示例
msg_box = Box3dArray()
msg_box.header = header
# 做循环填充信息,实际上OBJBox3dArray中的元素个数以及内容由检测结果决定
for i in range(3):
# 创建一个OBJBox3d类型的消息并进行初始化
msg = Box3d()
msg.class_id = int(self.i)
msg.center.x = 1.0
msg.center.y = 1.0
msg.center.z = 1.0
msg.dx = 1.0
msg.dy = 1.0
msg.dz = 1.0
msg.yaw = 1.0
# 将OBJBox3d消息添加到数组中,obj_box3d_array是上面自定义消息格式中的数组消息名称
msg_box.obj_box3d_array.append(msg)
# 发布消息
self.publisher_.publish(msg_box)
self.i += 1
def main(args=None):
# 初始化ROS2
rclpy.init(args=args)
# 创建节点
minimal_publisher = MinimalPublisher()
# 运行节点
rclpy.spin(minimal_publisher)
# 销毁节点,退出ROS2
minimal_publisher.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
2.2 修改配置文件
- 修改package.xml,添加依赖信息
ament_python
rclpy
std_msgs
geometry_msgs
box_interfaces
message_generation
message_runtime
rosidl_default_generators
rosidl_interface_packages
- 修改setup.py文件,添加node节点信息
entry_points={
'console_scripts': [
'pub_box3d_node = pub_box3d.publish_box3d:main',
],
},
3.编译和运行
编译
cd myros_ws colcon build source install/setup.bash ros2 run pub_box3d pub_box3d_node
新打开一个终端
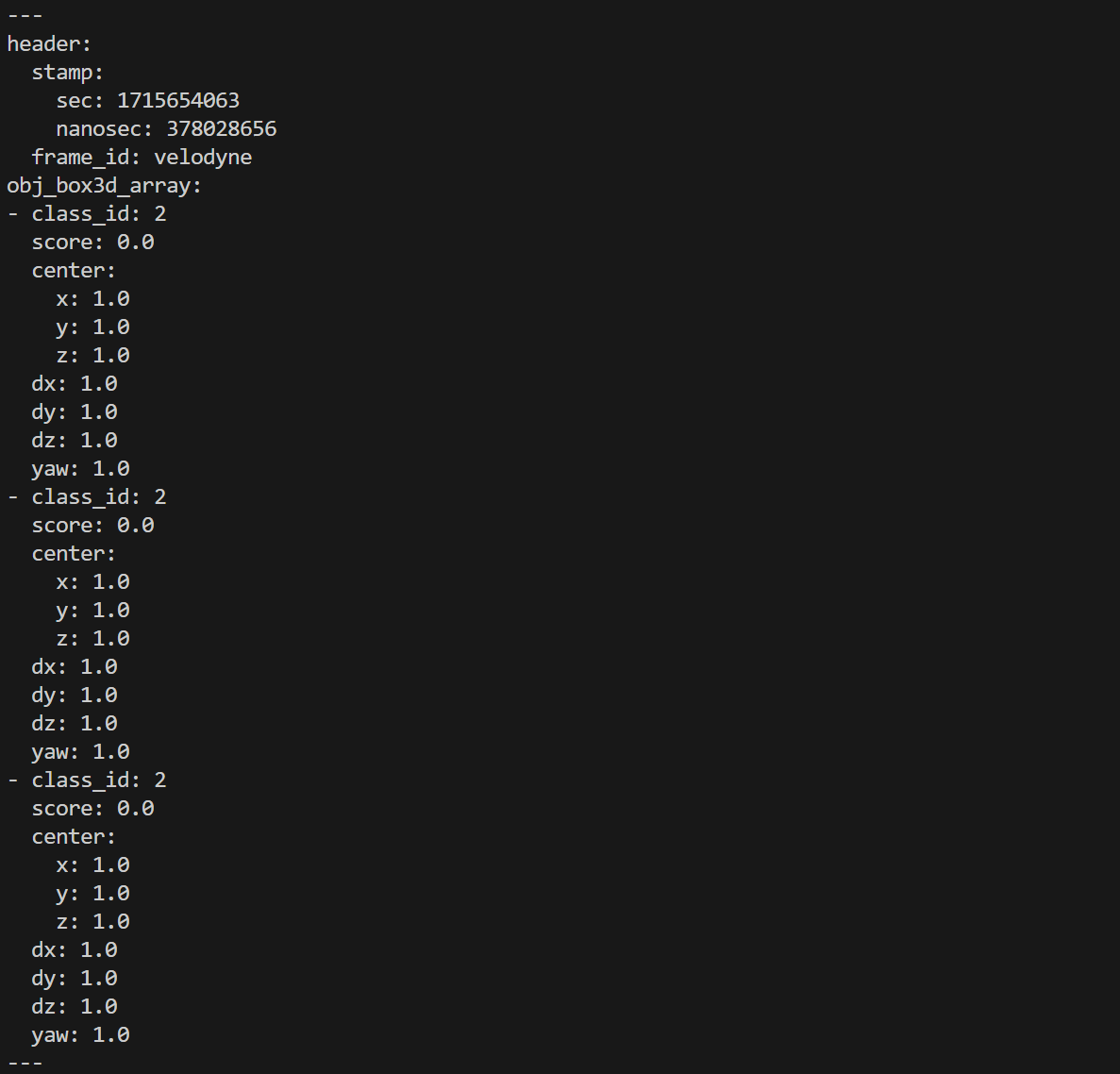
source install/setup.bash # 查看当前的topic ros2 topic list # 打印topic信息 ros2 topic echo /velodyne/box3ds
结果显示如下,这是一条完整的topic,类型是obj_box3d_array数组,每个数组自定义了3个结果
再看一下发布频率
ros2 topic hz /velodyne/box3ds
打印日志,因为再发布节点中设置了0.5s的定时器,所以这里的频率的2hz:
average rate: 2.001
min: 0.499s max: 0.500s std dev: 0.00048s window: 3
average rate: 2.001
min: 0.499s max: 0.500s std dev: 0.00037s window: 6
average rate: 2.000
min: 0.499s max: 0.500s std dev: 0.00034s window: 8
average rate: 2.000
免责声明:我们致力于保护作者版权,注重分享,被刊用文章因无法核实真实出处,未能及时与作者取得联系,或有版权异议的,请联系管理员,我们会立即处理! 部分文章是来自自研大数据AI进行生成,内容摘自(百度百科,百度知道,头条百科,中国民法典,刑法,牛津词典,新华词典,汉语词典,国家院校,科普平台)等数据,内容仅供学习参考,不准确地方联系删除处理! 图片声明:本站部分配图来自人工智能系统AI生成,觅知网授权图片,PxHere摄影无版权图库和百度,360,搜狗等多加搜索引擎自动关键词搜索配图,如有侵权的图片,请第一时间联系我们,邮箱:ciyunidc@ciyunshuju.com。本站只作为美观性配图使用,无任何非法侵犯第三方意图,一切解释权归图片著作权方,本站不承担任何责任。如有恶意碰瓷者,必当奉陪到底严惩不贷!



