
【目标跟踪算法】Strong SORT多目标跟踪模型论文解析+代码详解
温馨提示:这篇文章已超过390天没有更新,请注意相关的内容是否还可用!
1. Strong SORT算法的背景和概述
Strong SORT算法基于经典的Deep SORT模型,并从目标检测模型、表征特征模型和匹配算法等各个方面对其进行了升级优化。
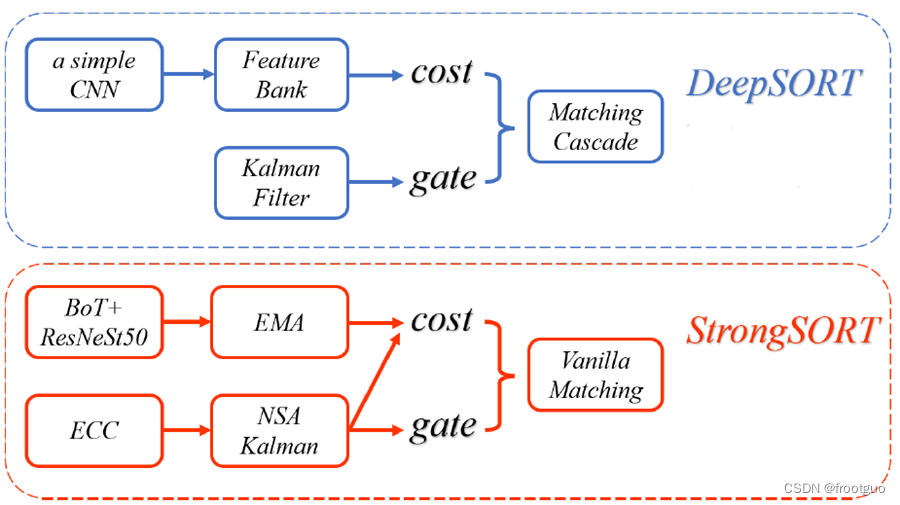
1.1 表观特征分支的优化算法
对于Strong SORT算法的表观特征分支部分,主要是进行了2方面的优化,一是优化了特征提取器的能力,二是利用了EMA(Exponential moving average)特征更新策略从而取代Deep SORT算法中的特征库。
- Strong SORT使用了更强大的表观特征提取器BoT来代替原来简单的CNN网络。以ResNeSt50作为主干并在DukeMTMC-reID数据集上进行预训练,该表观特征提取器可以提取更多的判别特征。
- 此外,将特征库替换为EMA(Exponential moving average)特征更新策略。对于轨迹i在第t帧的表观特征如下:

EMA特征更新策略不仅仅增强了匹配的质量,同时也节省了匹配的时间,不再需要和特征库(通常是1条轨迹保留近100个特征向量组成)相匹配。
1.2 运动模型分支的优化算法
对于Strong SORT算法的运动模型分支部分,主要是进行了2方面的优化,一是采用ECC算法(Enhanced Correlation Coefficient)进行了摄像机运动补偿,二是使用了NSA卡尔曼算法取代了传统的卡尔曼算法。
- ECC算法(Enhanced Correlation Coefficient)
ECC算法全名是增强相关系数算法,这个算法是适用于图像配准任务的。也就是对于两张内容差异小,但是存在光照、尺度、颜色、平移等变换影响的图像,将二者对齐。

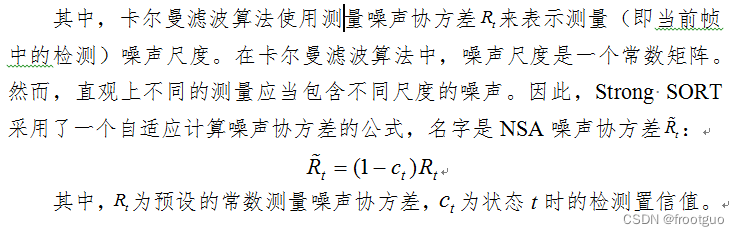
- NSA卡尔曼滤波算法
在Deep SORT中,基于线性运动假设的卡尔曼滤波器用于对物体运动进行建模。它由状态估计步骤和状态更新步骤组成。卡尔曼滤波器先产生当前状态变量的估计,以及它们的不确定性。然后用估计状态和测量值的加权平均值更新这些估计值。
2. StrongSORT代码详解
-
此文章是对mikel-brostrom代码仓的StrongSORT代码进行详解;
-
具体代码分析请参考StrongSORT(deepsort强化版)浅实战+代码解析这篇博客,介绍的很清晰。
-
注意调用过程StrongSORT类–> Tracker类–>Track类–>KalmanFilter类
免责声明:我们致力于保护作者版权,注重分享,被刊用文章因无法核实真实出处,未能及时与作者取得联系,或有版权异议的,请联系管理员,我们会立即处理! 部分文章是来自自研大数据AI进行生成,内容摘自(百度百科,百度知道,头条百科,中国民法典,刑法,牛津词典,新华词典,汉语词典,国家院校,科普平台)等数据,内容仅供学习参考,不准确地方联系删除处理! 图片声明:本站部分配图来自人工智能系统AI生成,觅知网授权图片,PxHere摄影无版权图库和百度,360,搜狗等多加搜索引擎自动关键词搜索配图,如有侵权的图片,请第一时间联系我们,邮箱:ciyunidc@ciyunshuju.com。本站只作为美观性配图使用,无任何非法侵犯第三方意图,一切解释权归图片著作权方,本站不承担任何责任。如有恶意碰瓷者,必当奉陪到底严惩不贷!



