
MobileViT、MobileViTv2、MobileViTv3学习笔记(自用)
1、MobileViT,一种用于移动设备的轻量级通用视觉转换器
论文地址:https://arxiv.org/abs/2110.02178
MobileVitV1是苹果公司2021年发表的一篇轻量型主干网络,它是CNN与Transfomrer的混合架构模型,这样的架构模型也是现在很多研究者们青睐的架构之一。自Vision Transformer出现之后,人们发现Transfomrer也可以应用在计算机视觉领域,并且效果还是非常不错的。但是基于Transformer的网络模型存在着问题:就是该结构的网络模型需要大量的数据才能得到不错的效果,如果使用少量数据进行训练,那么会掉点很明显。出现这种现象的原因就是,Transformer并没有像CNN那样具有空间归纳偏置的特征。因为空间归纳偏置允许CNN在不同的视觉任务中学习较少参数的表示。那么什么是空间归纳偏置呢?
Transformer相对于CNN的缺点
空间归纳偏置是对目标函数的一种必要性假设,大概意思就是像人一样带着某种偏见去看待事物,归纳 (Induction) 指从一些例子中寻找共性、泛化,形成一个较通用的规则的过程。偏置 (Bias) 则是指对模型的偏好。从现实生活中观察到的现象中归纳出一定的规则(heuristics),然后对模型做一定的约束,从而可以起到“模型选择”的作用,即从假设空间中选择出更符合现实规则的模型。
CNN的归纳偏置一般来说有两种:
- locality:CNN是以滑动窗口的形式一点一点地在图片上进行卷积的,所以假设图片上相邻的区域会有相邻的特征,靠得越近的东西相关性越强;
- translation equivariance(平移等变性或平移同变性):写成公式就是f(g(x))=g(f(x)),不论是先做 g 这个函数,还是先做 f 这个函数,最后的结果是不变的;其中f代表卷积操作,g代表平移操作。(因为在卷积神经网络中,卷积核就相当于是一个模板,不论图片中同样的物体移动到哪里,只要是同样的输入进来,然后遇到同样的卷积核,那么输出永远是一样的)
- 一旦神经网络有了这两个归纳偏置之后,他就拥有了很多的先验信息,所以只需要相对较少的数据就可以学习一个相对比较好的模型。但是对于transformer来说,它没有这些先验信息,所以它对视觉的感知全部需要从这些数据中自己学习。
Transformer就是只有刚开始将图片切成patch的时候和加位置编码的时候用到了,除此之外,就再也没有用任何针对视觉问题的归纳偏置了,而且位置编码也是随机初始化的1-D信息。所以在中小数据集上ViT不如CNN是可以理解的。
该图来源于【机器学习】浅谈 归纳偏置 (Inductive Bias)_何处闻韶的博客-CSDN博客_归纳偏置
虽然Transformer没有像CNN那样具有空间归纳偏置(平移不变性(translation equivariance )和局部像素之间的相关性(locality)),必须要大量数据来进行学习数据中的某种特性,从而导致无法很好的应用在这样的边缘设备,或者说一般的设备也很难跑的动。但是CNN也有缺点,就是CNN在空间上获取的信息是局部的,因此一定程度上会制约着CNN网络结构的性能,相反Transformer的自注意力机制能够获取全局信息。

为此在本文中作者就结合两者的优势,为移动视觉任务构建一个轻量级、低延迟的网络。从而提出MobileViT,一种用于移动设备的轻量级通用视觉转换器。它结合了CNN(例如,空间归纳偏差和对数据增强不太敏感)和ViTs(例如,输入自适应加权和全局处理)的优点。在MS-COCO对象检测任务中,在相同数量的参数下,MobileViT的准确性比MobileNetv3高5.7%。移动视觉任务需要轻量级、低延迟和满足设备资源约束的精确模型,并且是通用的,但是本文中的方式并不满足延迟低的要求,其中的原因就是因为多头注意力机制的原因。
注意:浮点操作(FLOPs)不足以满足移动设备上的低延迟,因为FLOPs忽略了几个重要的推理相关因素,如内存访问、并行度和平台特征(Ma et al, 2018)。
下图是本文提供的一般的Vision Transformer的结构,首先将C,H,W的图片进行Patch处理成N个向量,然后经过线性层进行降低向量维度,再经过位置编码,然后再经过N个Transformer块,在通过class token来进行分类。

标准的Vision Transformer
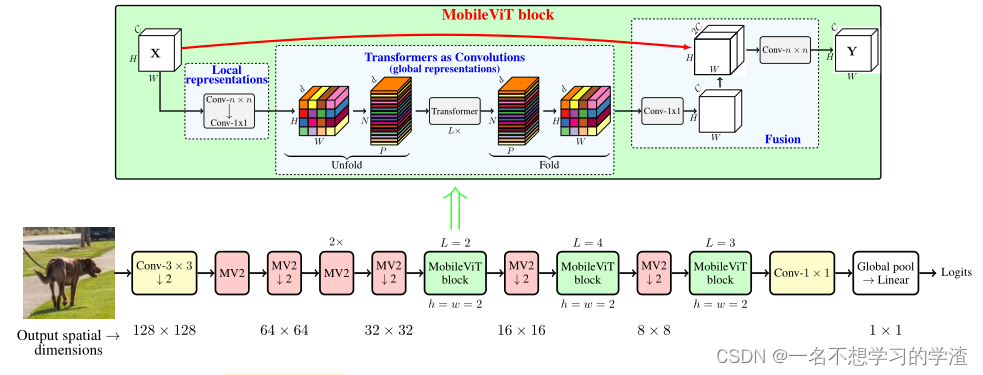
MobileViT结构。这里,MobileViT块中的convn × n表示一个标准的n × n卷积,MV2指的是MobileNetv2块。执行下采样的块用↓2标记。
本文的网络结构如上所示,我们可以看出该网络结构就是通过MV2模块和MobileViT 模块所组成,其中MV2块就是MobileNetv2的block,它是一种倒残差结构,即特征图的维度是先升后降,据相关论文中描述说,更高的维度经过激活函数后,它损失的信息就会少一些。

MobileNetv2的block
MobileViT 模块相比较就有些复杂,如下图所示,这也是这篇论文的重点,首先将特征图通过一个卷积核大小为nxn(代码中是3x3)的卷积层进行局部的特征建模,然后通过一个卷积核大小为1x1的卷积层调整通道数。接着通过Unfold -> Transformer -> Fold结构进行全局的特征建模,然后再通过一个卷积核大小为1x1的卷积层将通道数调整回原始大小。接着通过shortcut捷径分支(在V2版本中将该捷径分支取消了)与原始输入特征图进行Concat拼接(沿通道channel方向拼接),最后再通过一个卷积核大小为nxn(代码中是3x3)的卷积层做特征融合得到输出。
由于语言组织能力,所以文本参考原文链接:https://blog.csdn.net/qq_37541097/article/details/126715733
由于为了减少参数量,Unfold -> Transformer -> Fold,在本次的自注意力机制中,只选择了位置相同的像素点进行点积操作。这样做的原因大概就是因为和所有的像素点都进行自注意力操作会带来信息冗余,毕竟不是所有的像素都是有用的。具体的做法如下图所示。

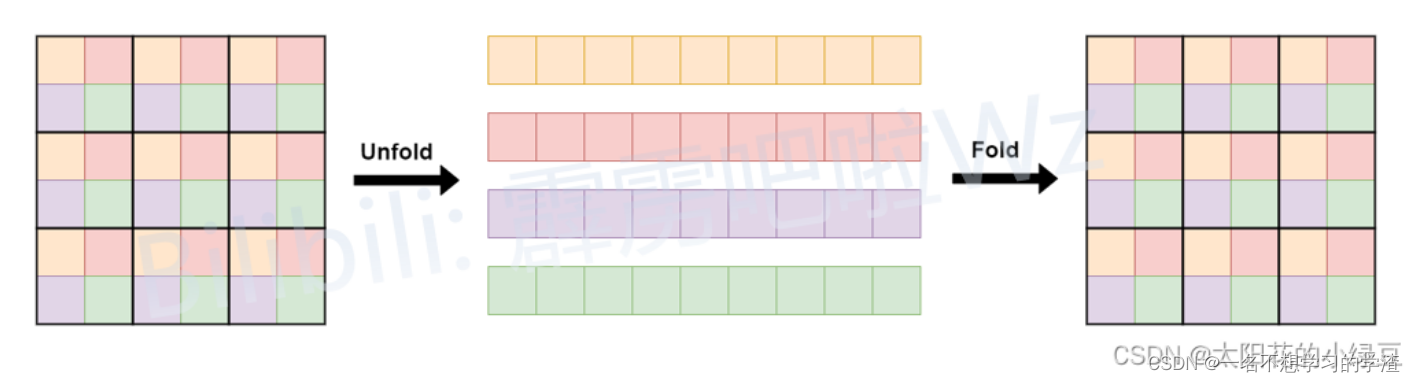
该图像来源于:MobileViT模型简介_太阳花的小绿豆的博客-CSDN博客_mobile模型
这里作者给出了关于MobileViT 模块为什么能够成功的原因。标准卷积可以被看作是三个连续操作的堆栈:(1)展开,(2)矩阵乘法(学习局部表示),(3)折叠。MobileViT块类似于卷积,因为它也利用了相同的构建块。MobileViT块用更深层次的全局处理(变压器层的堆栈)取代了卷积中的局部处理(矩阵乘法)。因此,MobileViT具有类似卷积的特性(例如,空间偏差)。因此,MobileViT块可以被看作是卷积的变压器。通过该模块也具有全局处理能力,这也是模型轻量化的原因,不需要太多的参数进行学习。
后面作者针对不同的任务对不同patch size进行的实验,感兴趣的话可以自行了解。
2、MobileViTv2,移动视觉变压器的可分离自我注意
论文地址:https://arxiv.org/abs/2206.02680

MobileViTv1与卷积的相关指标对比
MobileViT可以在多种移动视觉任务中实现最先进的性能,包括分类和检测。虽然这些模型的参数较少,但与基于卷积神经网络的模型相比,它们具有较高的延迟,如上图所示。 MobileViT的主要效率瓶颈是Transformer 的多头自注意(MHA),它需要O(k2)相对于token的数量的时间复杂度。此外,MHA需要昂贵的操作(例如,批处理矩阵乘法)来计算自注意,影响资源受限设备的延迟。从而提出了一种具有线性复杂度的可分离自我注意方法,其中复杂度为O(k)。MobileViTv2在ImageNet数据集上的准确率达到75.6%,在移动设备上运行速度比MobileViT快3.2倍的情况下,其性能比MobileViT高出约1%
注意:对于图像数据而言,其数据格式为[H, W, C]是三维矩阵明显不是Transformer想要的。所以需要先通过一个Embedding层来对数据做个变换。如下图所示,首先将一张图片按给定大小分成一堆Patches。以ViT-B/16为例,将输入图片(224x224)按照16x16大小的Patch进行划分,划分后会得到 (224/16)^2=196 个Patches。接着通过线性映射将每个Patch映射到一维向量中,以ViT-B/16为例,每ge Patche数据shape为[16, 16, 3]通过映射得到一个长度为768的向量(后面都直接称为token)。[16, 16, 3] -> [768]。
如下图,我们可以看出, MobileViTv2在局部表示中将一般的卷积变成了深度可分离卷积操作降低计算量,并且也取消了残差结构以及特征融合部分(在论文中说这样会使最终结果会好一些)。从结构上来看,就知道计算量肯定减少了。个人觉得这能涨一个点,还是非常厉害的,说明设计的非常好。

可分离自注意力方法的主要思想是计算关于潜在token L 的上下文分数。然后这些分数用于重新加权输入token并生成一个上下文向量,该向量编码全局信息。因为自注意力是针对潜在token计算的,所以所提出的方法可以将Transformer中自注意力的复杂度降低 k 倍。所提出的方法的一个简单而有效的特征是它使用逐元素操作(例如,求和和乘法)来实现,使其成为资源受限设备的不错选择。因此将所提出的注意力方法称为可分离自注意力,因为它允许我们通过用两个单独的线性计算替换二次 MHA 来编码全局信息。改进的模型 MobileViTv2 是通过在 MobileViT 中将 MHA 替换为可分离的自注意力来获得的。

3、MobileViTv3,移动友好的视觉转换器,简单有效地融合了本地,全局和输入功能
论文地址:https://arxiv.org/abs/2209.15159
虽然主要的mobilevitv1块有助于实现具有竞争力的最先进的结果,但mobilevitv1块中的融合块创建了扩展挑战,并具有复杂的学习任务。我们提出对融合块进行简单有效的修改,以创建mobilevitv3块,解决了伸缩问题,简化了学习任务。
MobileViTv2体系结构删除了融合块,并使用了线性复杂度的Transformer得到了比MobileViTv1更好的性能。将本文提出的融合块添加到MobileViTv2中,以创建MobileViTv3-0.5,0.75和1.0模型。与MobileViTv2相比,这些新模型在ImageNet-1k、ADE20K、COCO和PascalVOC2012数据集上提供了更好的精度。
使用了简单有效的方法来融合输入、局部(CNN)和全局(ViT)特征来提升模型的精度。
 在本论文中,提出了对现有MobileViTv1块体系结构的四个设计更改。
在本论文中,提出了对现有MobileViTv1块体系结构的四个设计更改。1、 融合块中用1x1卷积层替换3x3卷积层。这一块有点不理解,个人感觉就是为了降低计算量,毕竟1x1卷积核可以通过控制卷积核数量实现降维或升维。优势就在于 1x1卷积核 会使用更少的权重参数数量。在输入尺寸不发生改变的情况下而增加了非线性,所以会增加整个网络的表达能力。
在融合模块中替换3×3卷积层存在两个主要动机。首先,融合部分独立于特征图中其他位置的局部和全局特征,以简化融合模块的学习任务。从概念上讲,3×3卷积层融合了输入特征、全局特征以及其他位置的输入和全局特征,这是一项复杂的任务。融合模块的目标可以简化,因为它可以融合输入和全局特征,而不依赖于特征图中的其他位置。因此,作者在融合中使用1×1卷积层,而不是3×3卷积层。
其次,将3×3卷积层替换为1×1卷积层是消除MobileViTv1架构扩展中的主要限制之一。通过改变网络宽度并保持深度恒定,将MobileViT-v1从XXS扩展到S。更改MobileViTv1 Block的宽度(输入和输出通道数)会导致参数和FLOP的数量大幅增加。例如,如果输入和输出通道在MobileViTv1 Block中加倍(2×),则融合模块内3×3卷积层的输入通道数增加4×,输出通道数增加2×,因为输入到3×3卷积层的是输入和全局表示块特征的串联。这导致MobileViTv1 Block的参数和FLOP大幅增加。使用1×1卷积层可避免在缩放时参数和FLOP的大幅增加。
2、本地和局部特征融合。在融合层,来自本地和全局表示块的特征被连接到我们提出的MobileViTv3块中,而不是输入和全局表示特征。这是因为与输入特征相比,局部表示特征与全局表示特征更密切相关。局部表示块的输出通道略高于输入特征的通道。这导致输入特征映射到融合块的1x1卷积层的数量增加,但由于3x3卷积层改为1x1卷积层,参数和flop的总数明显少于基线MobileViTv1块
3、融合输入。在论文中说:ResNet和DenseNet等模型中的残余连接已证明有助于优化体系结构中的更深层次。并且增加了这个残差结构后,消融实验证明能够增加0.6个点。如下图所示。

4、在融合模块中将一般卷积变成了深度可分离卷积。这一部分的改进从消融研究结果中可以看出,这一变化对Top-1 ImageNet-1K的精度增益影响不大,从上图最后一行看出,掉了0.3个点,但是能够提供了良好的参数和精度权衡。
通过上面的几点,可以更好的对MobileViT块进行扩展,带来的优势也是非常巨大的,如下图所示,在参数量控制在6M以下,达到的效果也是非常惊人的,Top-1的精确度都快接近80%了。

对于代码,自己也在看,后面会继续更新,为自己加油吧!



