
ROS2快速入门Python篇-版本梳理、环境搭建、源码架构介绍



文章目录
- 1. ROS2版本说明及资料获取
- 1.1 ROS2版本更新记录
- 1.2 ROS1/ROS2各版本资料位置
- 2. humble安装
- 2.1 使用Binary方式安装与测试
- 2.2 使用源码方式安装与测试
- 2.2.1 源码下载
- 2.2.2 源码编译
- 2.2.3 运行测试
- 3. ROS架构体系
- 3.1 主要模块及其功能的概述
- 3.2 ros-core, ros-base,ros_desktop差异
- 3.3 DDS介绍
1. ROS2版本说明及资料获取
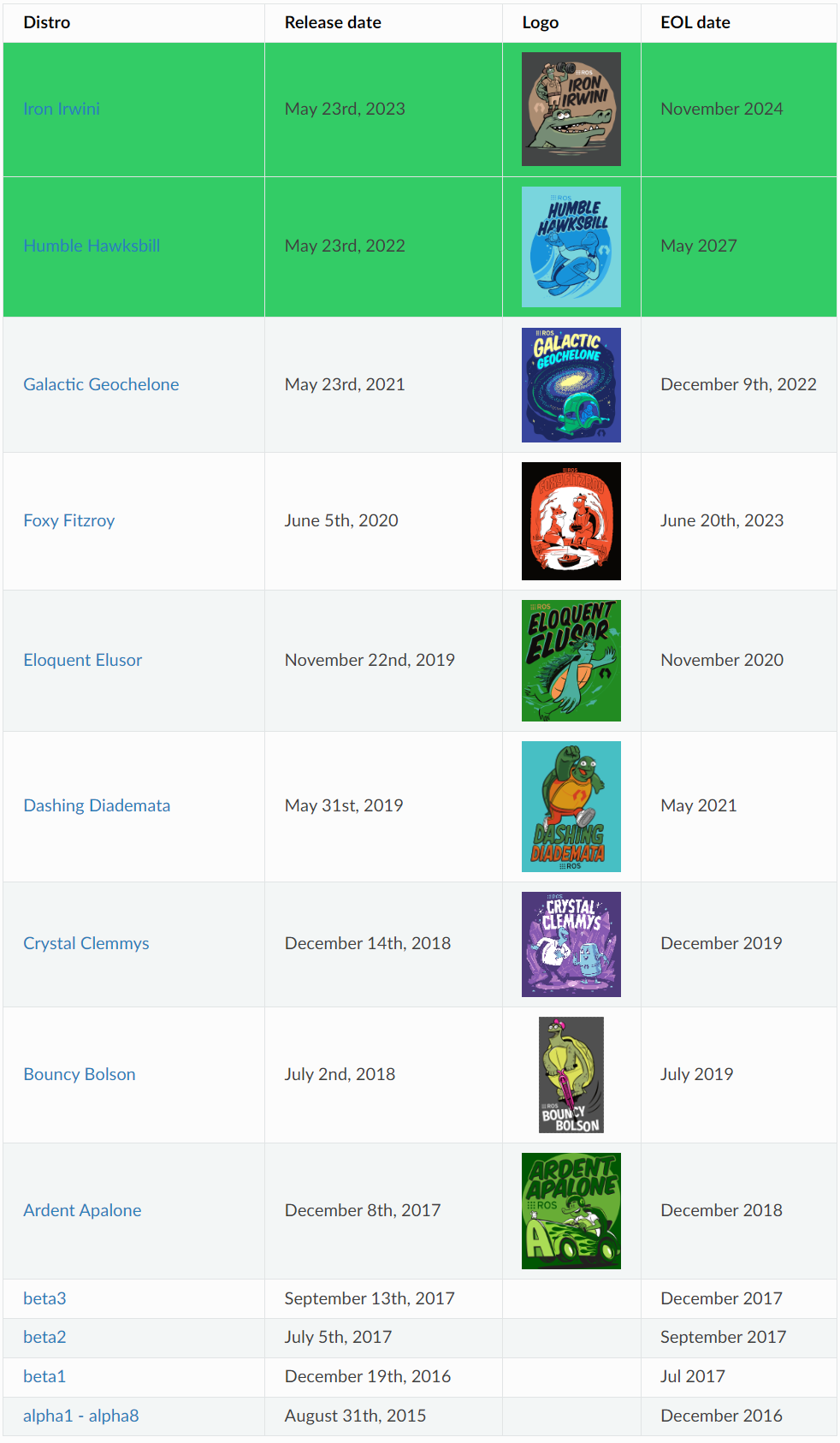
1.1 ROS2版本更新记录
https://docs.ros.org/en/foxy/Releases.html
ROS1版本更新记录
https://wiki.ros.org/Distributions

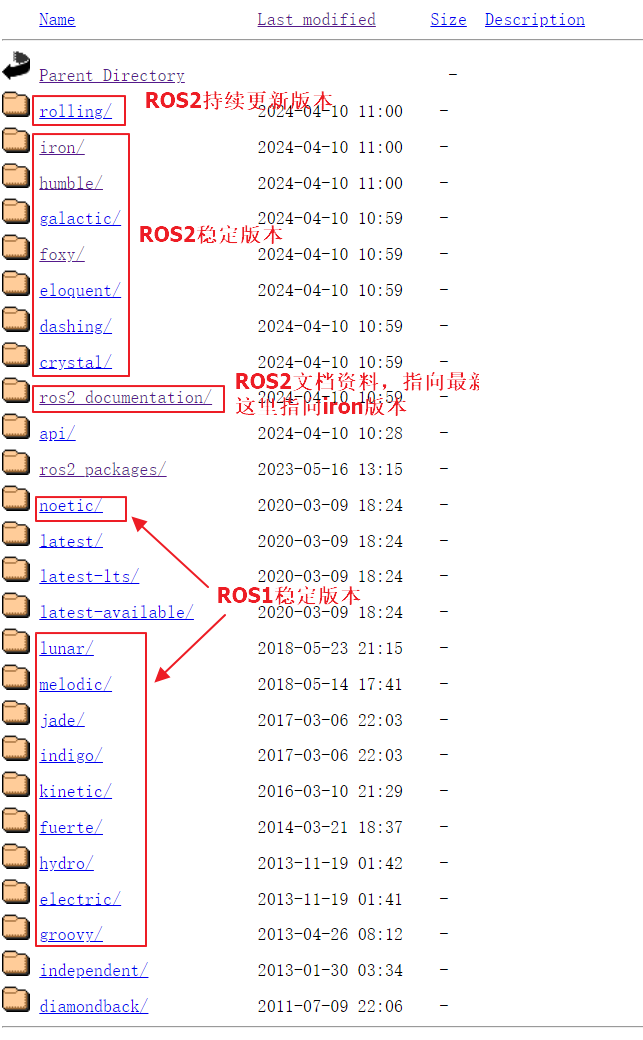
1.2 ROS1/ROS2各版本资料位置
https://docs.ros.org/en/?C=M;O=D
本系列将使用humble来讲解Ros2的使用。
2. humble安装
两种方式: Binary安装和源码安装
2.1 使用Binary方式安装与测试
binary安装支持Ubuntu Linux Jammy (Ubuntu 22.04) 64-bit x86 and 64-bit ARM,所以如果你装的是Ubuntu22.04, 可以直接使用这种方式安装或者使用源码安装。
We currently support Ubuntu Linux Jammy (22.04) 64-bit x86 and 64-bit ARM.
安装与测试步骤参考:
https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debians.html
2.2 使用源码方式安装与测试
如果是其他Linux系统,如树莓派4(Raspi OS基于Debian Bullseye),可以选择源码安装方式。
The current Debian-based target platforms for Humble Hawksbill are:
. Tier 1: Ubuntu Linux - Jammy (22.04) 64-bit
. Tier 3: Ubuntu Linux -Focal (20.04) 64-bit
. Tier 3: Debian Linux - Bullseye (11) 64-bit
Other Linux platforms with varying support levels include:
. Arch Linux, see alternate instructions
. Fedora Linux, see alternate instructions
. OpenEmbedded / webOS OSE, see alternate instructions
安装步骤参考:
https://docs.ros.org/en/humble/Installation/Alternatives/Ubuntu-Development-Setup.html
Ubuntu22.04源码安装步骤:
2.2.1 源码下载
#https://docs.ros.org/en/humble/Installation/Alternatives/Ubuntu-Development-Setup.html #suit for ubuntu22.04 sudo apt install software-properties-common sudo add-apt-repository universe sudo apt update && sudo apt install curl -y sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null sudo apt update && sudo apt install -y \ python3-flake8-docstrings \ python3-pip \ python3-pytest-cov \ ros-dev-tools sudo apt install -y \ python3-flake8-blind-except \ python3-flake8-builtins \ python3-flake8-class-newline \ python3-flake8-comprehensions \ python3-flake8-deprecated \ python3-flake8-import-order \ python3-flake8-quotes \ python3-pytest-repeat \ python3-pytest-rerunfailures sudo apt install python3-colcon-common-extensions #download git listed in ros2.repos (https://github.com/ros2/ros2.git) #code size 561M mkdir -p ./ros2_humble/src cd ros2_humble vcs import --input https://raw.githubusercontent.com/ros2/ros2/humble/ros2.repos src
国内网络访问raw.githubusercontent.com出现Connection refused问题处理
如果遇到这样的错误
$ sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
curl: (7) Failed to connect to raw.githubusercontent.com port 443 after 70 ms: Connection refused
在网站https://sites.ipaddress.com/查询raw.githubusercontent.com的ip地址
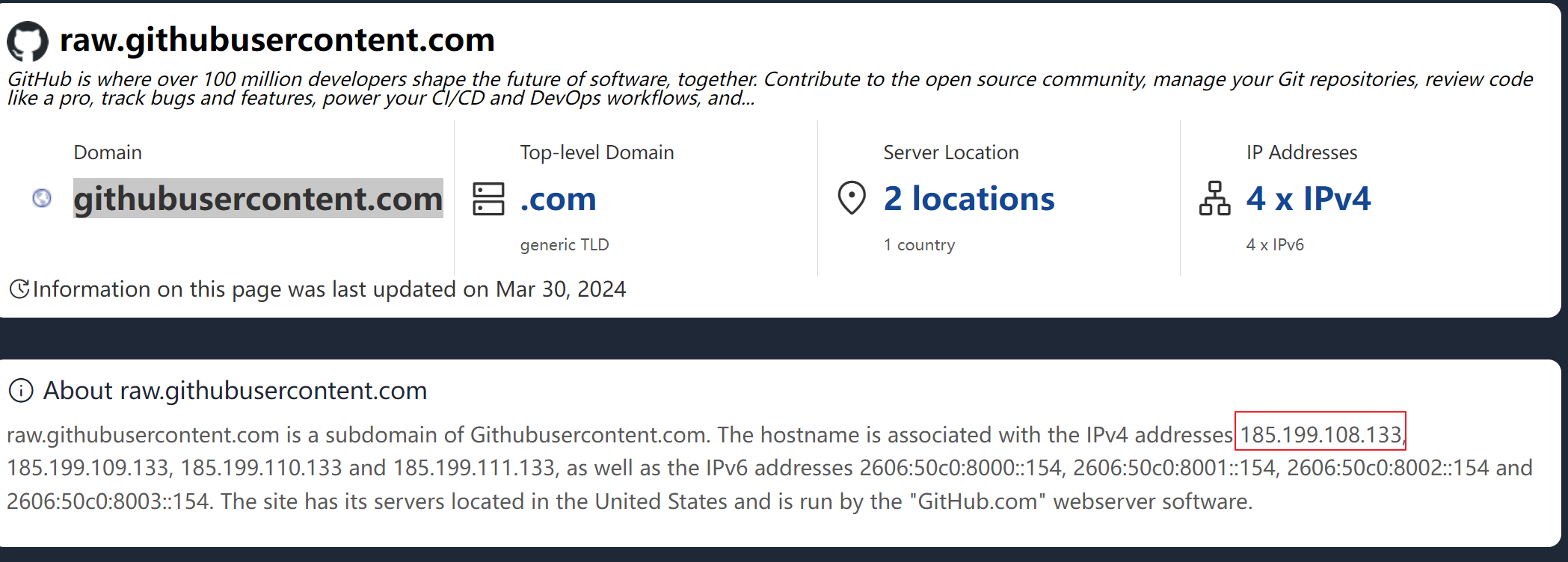
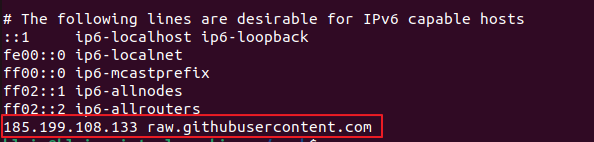
添加到/etc/hosts文件中
2.2.2 源码编译
sudo apt upgrade sudo rosdep init rosdep update rosdep install --from-paths src --ignore-src -y --skip-keys "fastcdr rti-connext-dds-6.0.1 urdfdom_headers" cd ros2_humble/ colcon build --symlink-install
sudo rosdep init遇到cannot download default sources list from问题
$ sudo rosdep init ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.
重试几次可成功,原因未知,可能是单纯的网络问题。
$ sudo rosdep init Wrote
/etc/ros/rosdep/sources.list.d/20-default.list Recommended: please run
rosdep update
2.2.3 运行测试
初始化运行环境 echo "source /ros2_humble/install/local_setup.bash" >> ~/.bashrc
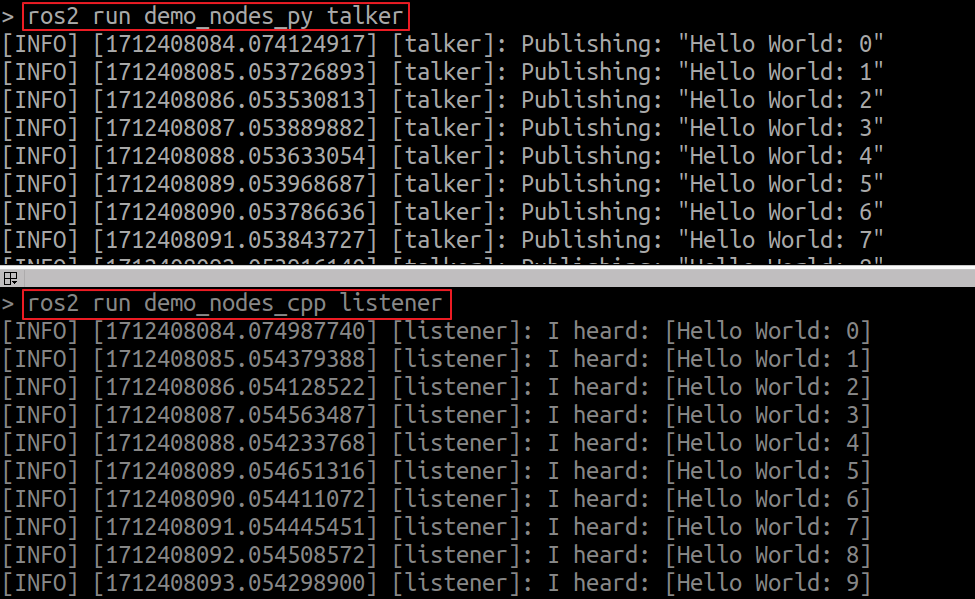
新终端运行talker示例程序
ros2 run demo_nodes_cpp talker
新终端运行listener示例程序
ros2 run demo_nodes_py listener
结果如图所示
rosrun和ros2 run区别
rosrun和ros2 run都是用于在ROS环境中运行节点的命令行工具,但它们分别适用于不同版本的ROS。
rosrun:
rosrun命令是用于在ROS1中运行节点的工具。它允许你直接指定要运行的ROS软件包中的节点,而不需要提前source或者setup.bash ROS环境。它的使用方式是:
rosrun package_name node_name
其中,package_name是要运行节点所属的ROS软件包的名称,node_name是要运行的节点的名称。
ros2 run:
ros2 run命令是用于在ROS 2中运行节点的工具。它的功能类似于rosrun,但是针对ROS2环境。它允许你直接指定要运行的ROS软件包中的节点,而不需要提前source或者setup.bash ROS环境。它的使用方式也是类似的:
ros2 run package_name node_name
其中,package_name是要运行节点所属的ROS软件包的名称,node_name是要运行的节点的名称。
3. ROS架构体系
3.1 主要模块及其功能的概述
模块 功能 rclcpp 这是 ROS 2 的 C++ 客户端库。它提供了一个面向对象的接口,用于创建节点、发布和订阅主题、调用服务等。rclcpp 提供了一个类似于 ROS 1 的 roscpp 的接口,但是专门为 ROS 2 的分布式架构设计。 rclpy 与 rclcpp 类似,rclpy 是 ROS 2 的 Python 客户端库。它允许开发者使用 Python 来编写 ROS 2 节点,并与 ROS 2 系统进行交互。 rosidl 这个模块用于 ROS 2 中的消息和服务接口定义语言 (IDL)。它允许定义 ROS 2 中使用的消息和服务的结构,并生成用于序列化和反序列化这些消息的代码 rcl ROS 2 的核心 C 语言实现。rcl 提供了一个低级别的 ROS 2 客户端库,用于与 ROS 2 的中间件通信。 rmw ROS Middleware Interface (RMW) 是 ROS 2 与不同通信中间件之间的接口。ROS 2 支持多种不同的中间件,如 FastRTPS、Cyclone DDS 等,而 RMW 模块允许 ROS 2 与这些不同的中间件进行通信 ros2cli ROS 2 命令行工具的集合。这些工具用于管理 ROS 2 节点、主题、服务等,以及执行其他与 ROS 2 相关的任务。 ros2 launch 这是 ROS 2 中用于启动多个节点的工具。它允许用户使用 XML 或 Python 文件来描述节点的启动配置,并按照指定的配置启动这些节点。 3.2 ros-core, ros-base,ros_desktop差异
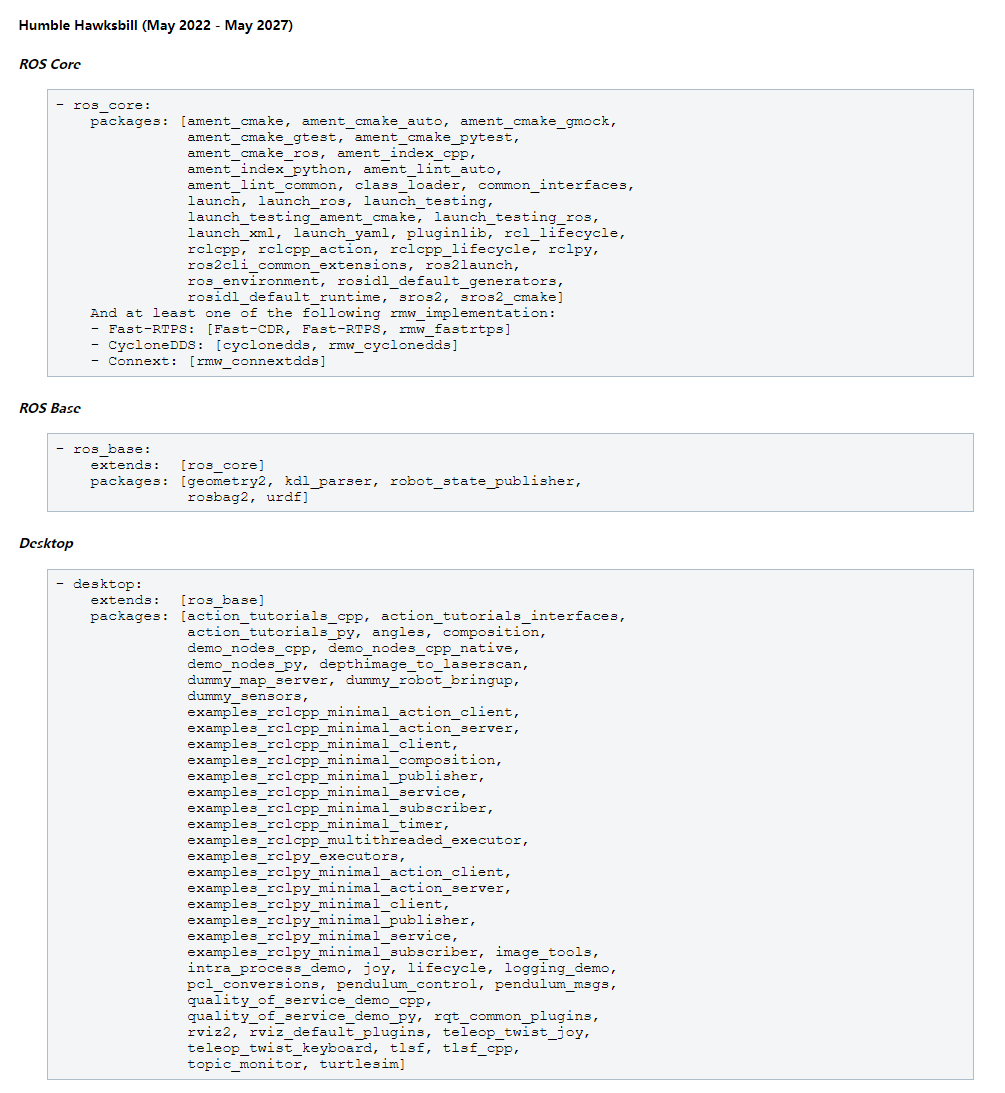
安装ROS的时候,总会有不同的安装选项,如ros-core, ros-base,ros_desktop,区别只是不同选项所包含组件有的多,有的少些而已。
ros_core:ros_core是ROS的核心组件,它包含了ROS的基本功能和工具,例如ROS Master、rosout日志记录节点等。ros_core只包含最基本的ROS功能,适用于用户想要自定义自己的ROS环境的情况。
ros_base:ros_base是一个比ros_core更大的安装选项,它包含了ros_core中的所有内容,同时还包含了一些额外的ROS软件包,如常用的ROS库、工具和一些常用的传感器和执行器的驱动程序。ros_base提供了一个较为完整的ROS环境,适用于大多数ROS应用。
ros_desktop:ros_desktop是ROS安装的最完整的选项,它包含了ros_base中的所有内容,以及一些针对桌面用户的可视化工具和库,如rviz(ROS的三维可视化工具)、rqt(ROS的可视化工具集)等。ros_desktop适用于需要使用ROS进行开发和调试的桌面用户。
因此,这三个选项之间的关系是:ros_desktop包含了ros_base,ros_base包含了ros_core。用户可以根据其需求选择合适的安装选项。
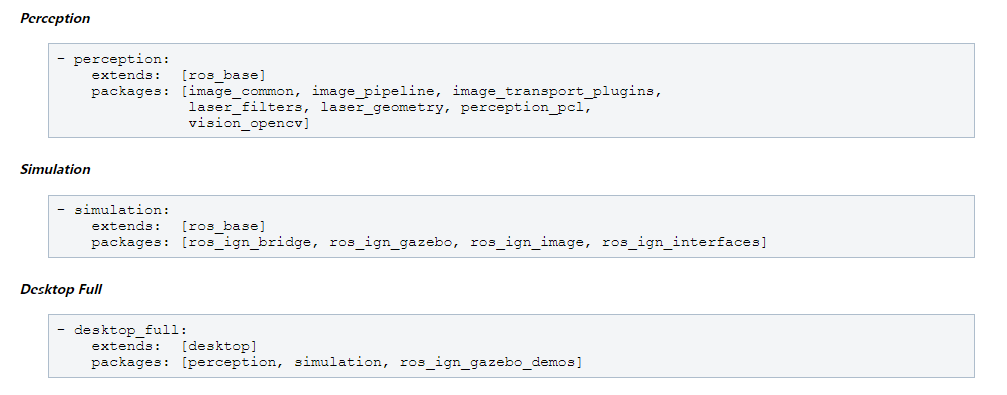
具体差异可见:https://www.ros.org/reps/rep-2001.html#id23
同样以humble版本为例
3.3 DDS介绍
DDS 指的是 Data Distribution Service(数据分发服务),是一种用于实时系统之间通信和数据共享的开放标准。在 ROS 2 中,DDS 用作 ROS 2 的通信中间件,用于在不同的 ROS 2 节点之间传输消息。
ROS 2 中的 DDS 实现充当了 ROS 2 架构的基础,负责节点之间的通信。ROS 2 支持多种 DDS 实现,例如 Fast DDS、Cyclone DDS 等。这些实现都遵循 DDS 标准,并提供了在 ROS 2 中使用 DDS 进行通信所需的接口和功能。
DDS 提供了一种灵活而强大的消息传输机制,具有高度的可靠性和实时性。它允许开发者根据系统的需求配置通信参数,并支持多种通信模式,包括发布-订阅、请求-响应等。这使得 DDS 成为构建实时分布式系统的理想选择,也成为了 ROS 2 作为机器人操作系统的核心通信技术。
DDS(Data Distribution Service)是一种用于实时系统之间通信和数据共享的开放标准。DDS 标准由 Object Management Group(OMG)制定和维护,是一种针对实时和嵌入式系统的数据通信协议。以下是 DDS 标准的主要特点和组成部分:
-
发布-订阅模型(Publish-Subscribe Paradigm):DDS 使用发布-订阅模型,允许数据的发布者(Publishers)向感兴趣的订阅者(Subscribers)广播数据。这种模型允许松散的耦合和异步通信,使得系统更加灵活和可扩展。
-
数据中心(Data-Centric):DDS 是一种数据中心的通信协议,强调数据的传输和共享。数据被视为中心,而不是消息传输机制。这种方法允许系统中的各个部分直接共享数据,而不需要显式的点对点通信。
-
实时性(Real-Time Capabilities):DDS 具有很好的实时性能,能够满足实时系统的要求。DDS 的实现通常提供了可配置的 QoS(Quality of Service)参数,允许开发者根据系统的需求调整通信的实时性、可靠性和带宽利用率等方面的参数。
-
自动发现和路由(Automatic Discovery and Routing):DDS 允许系统中的节点自动发现彼此,并建立通信连接。DDS 还支持动态的路由机制,允许在系统运行时动态地调整通信路径。
-
安全性(Security):DDS 提供了安全性的支持,包括身份验证、访问控制、加密等功能,以确保通信数据的机密性和完整性。
-
平台无关性(Platform-Independence):DDS 是一种平台无关的通信协议,可以在各种不同的操作系统和硬件平台上使用。
DDS 标准的实现通常由各个厂商提供,包括开源实现和商业实现。在实时系统、嵌入式系统、大规模分布式系统等领域,DDS
在提供高效、可靠的数据通信方面发挥着重要作用。
-





