
【ROS】ubuntu20.04的ROS Noetic安装全流程+遇到的问题记录
在众多ubuntu版本的选择中兜兜转转,我最后还是选择了稳定的20.04。
本人之前已经安装过一次ROS,也成功地导入了Urdf文件,
官方的安装教程:https://wiki.ros.org/cn/noetic/Installation/Ubuntu
sudo apt update sudo apt upgrade
找到系统里/etc/apt里面的source.list,然后
sudo chmod 777 sources.list
修改为可写文件,换源,可换清华源和阿里源。
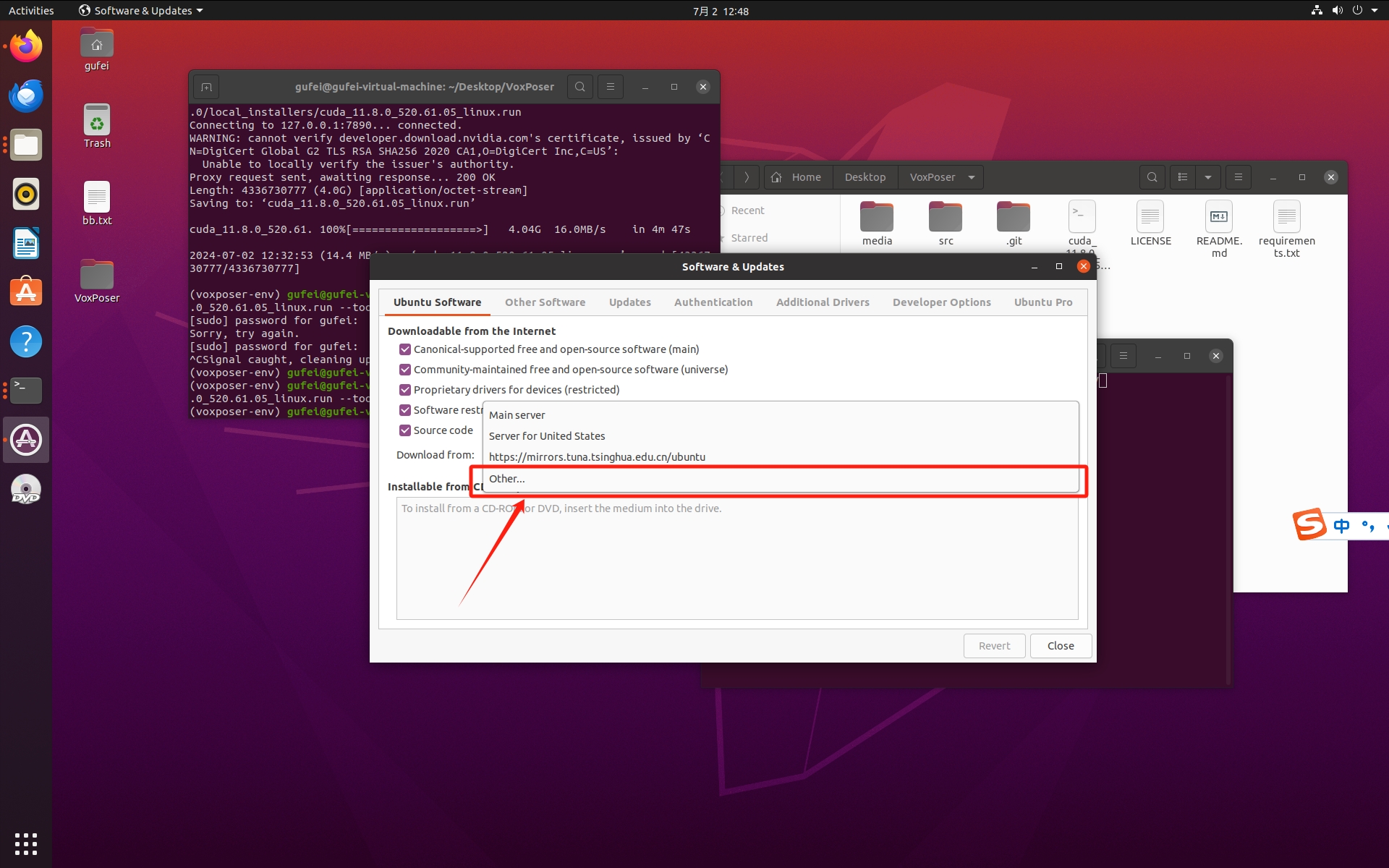
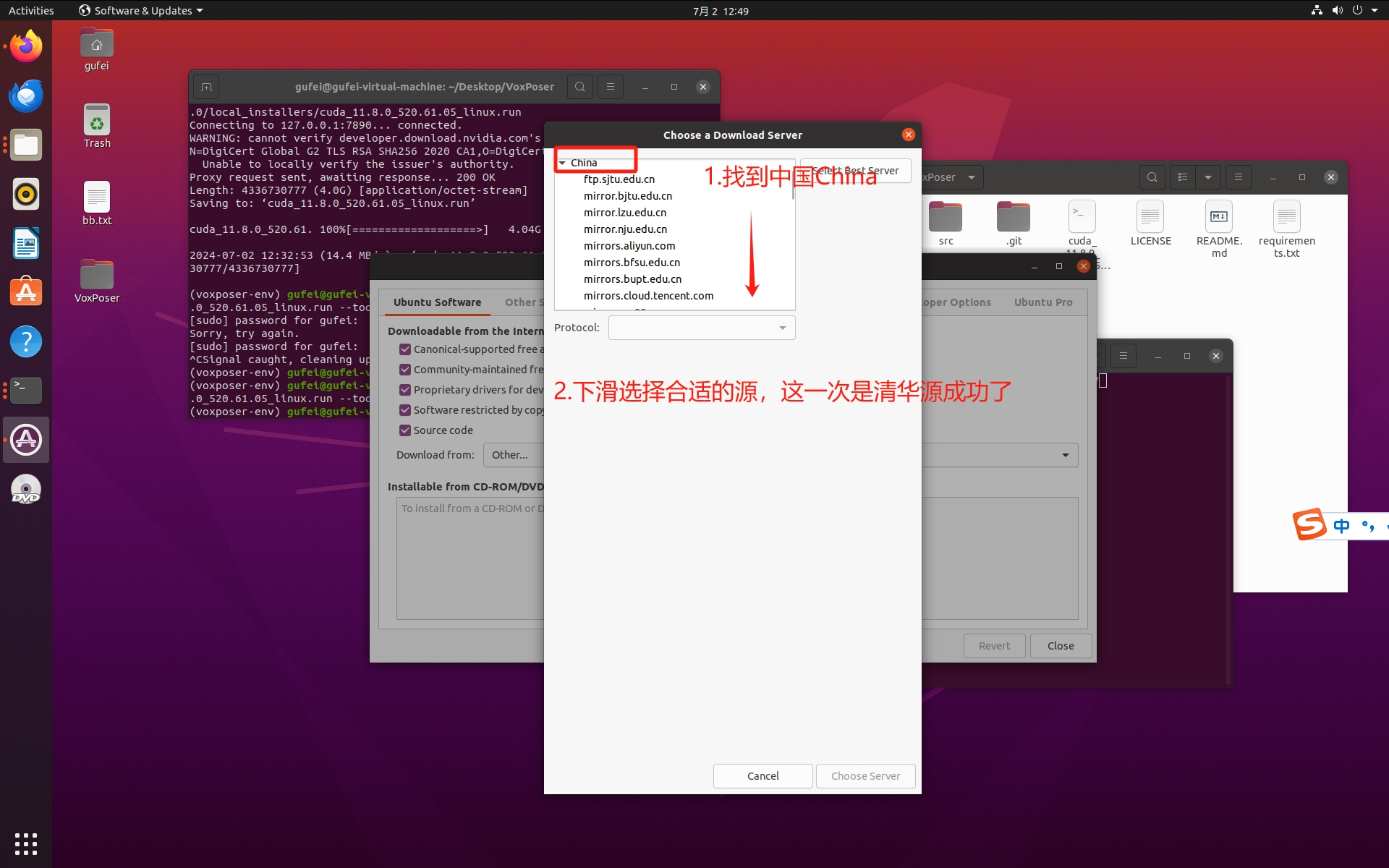
或者是在ubuntu的软件与更新里更换。
将其中 http://cn.archive.ubuntu.com 全部替换成阿里源 http://mirrors.aliyun.com
一定要sudo apt update和sudo apt upgrade才算换完源。
sudo apt install pip
发现已经以python3-pip的包存在于系统中。
# 清华源下载 sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list' # gpg导入 sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 # 确认软件包是新的 sudo apt update # ubuntu 20.04 选择noetic sudo apt install ros-noetic-desktop-full # 在使用ROS的每个bash终端中source这个脚本。 source /opt/ros/noetic/setup.bash # 每次自动source一下这个脚本 echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc source ~/.bashrc
官网给出了rosdep的初始化和升级方法,但是大概率跑不通,国内需要换用小鱼(鱼香ROS)写的rosdepc。(需要sudo apt install pip)
sudo pip install rosdepc sudo rosdepc init rosdepc update
现在应该已经装好了catkin。
mkdir -p ~/catkin_ws/src cd ~/catkin_ws catkin_make
应该已经成功catkin_make。
roscore
尝试启动ros,成功~
免责声明:我们致力于保护作者版权,注重分享,被刊用文章因无法核实真实出处,未能及时与作者取得联系,或有版权异议的,请联系管理员,我们会立即处理! 部分文章是来自自研大数据AI进行生成,内容摘自(百度百科,百度知道,头条百科,中国民法典,刑法,牛津词典,新华词典,汉语词典,国家院校,科普平台)等数据,内容仅供学习参考,不准确地方联系删除处理! 图片声明:本站部分配图来自人工智能系统AI生成,觅知网授权图片,PxHere摄影无版权图库和百度,360,搜狗等多加搜索引擎自动关键词搜索配图,如有侵权的图片,请第一时间联系我们,邮箱:ciyunidc@ciyunshuju.com。本站只作为美观性配图使用,无任何非法侵犯第三方意图,一切解释权归图片著作权方,本站不承担任何责任。如有恶意碰瓷者,必当奉陪到底严惩不贷!



