
机器学习笔记 - 用于3D数据分类、分割的Point Net简述


.png)

一、简述
在本文中,我们将了解Point Net,目前,处理图像数据的方法有很多。从传统的计算机视觉方法到使用卷积神经网络到Transformer方法,几乎任何 2D 图像应用都会有某种现有的方法。然而,当涉及到 3D 数据时,现成的工具和方法并不那么丰富。3D 空间中一个工具就是Point Net。点网是一种新型的神经网络,直接使用整个点云。
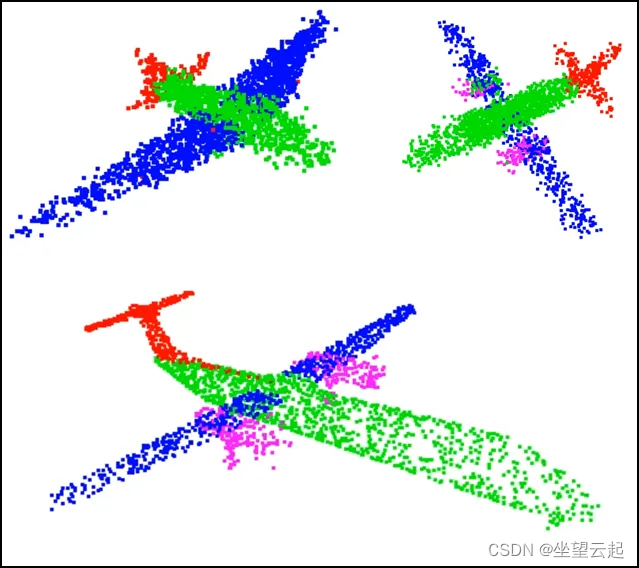
它可以对输入点云进行分类,执行语义分割,甚至部分分割。理解点网如何有效完成多项任务的关键在于,它能够提取点云的局部和全局特征, 而不管方向如何。然后它将这些特征传递到单独的头部以进行分类或分割任务。
点网提取任意方向的点云的局部和全局特征
点云只是 3D 空间中的一组 (x, y, z) 点(我们将讨论限制在 3D 空间内,但我们也可以考虑 LiDAR 情况下的强度等因素)。点云没有任何顺序,我们可以随意打乱 (x,y,z) 点,但我们仍然会得到完全相同的点云。点云对刚体运动也具有不变性,即,如果我们旋转和/或平移点云,它保持不变。它仍然代表相同的结构,只是方向和/或位置发生了变化。相邻点形成有意义的结构(属性),点云处理的主要用途是捕获这些空间结构并将它们编码为低维空间中的特征。
二、
文章版权声明:除非注明,否则均为主机测评原创文章,转载或复制请以超链接形式并注明出处。






