
【排序算法】深入解析快速排序(霍尔法&&三指针法&&挖坑法&&优化随机选key&&中位数法&&小区间法&&非递归版本)



文章目录
- 📝快速排序
- 🌠霍尔法
- 🌉三指针法
- 🌠挖坑法
- ✏️优化快速排序
- 🌠随机选key
- 🌉三位数取中
- 🌠小区间选择走插入,可以减少90%左右的递归
- 🌉 快速排序改非递归版本
- 🚩总结
📝快速排序
快速排序是一种分治算法。它通过一趟排序将数据分割成独立的两部分,然后再分别对这两部分数据进行快速排序。
本文将用3种方法实现:
🌠霍尔法
霍尔法是一种快速排序中常用的单趟排序方法,由霍尔先发现。
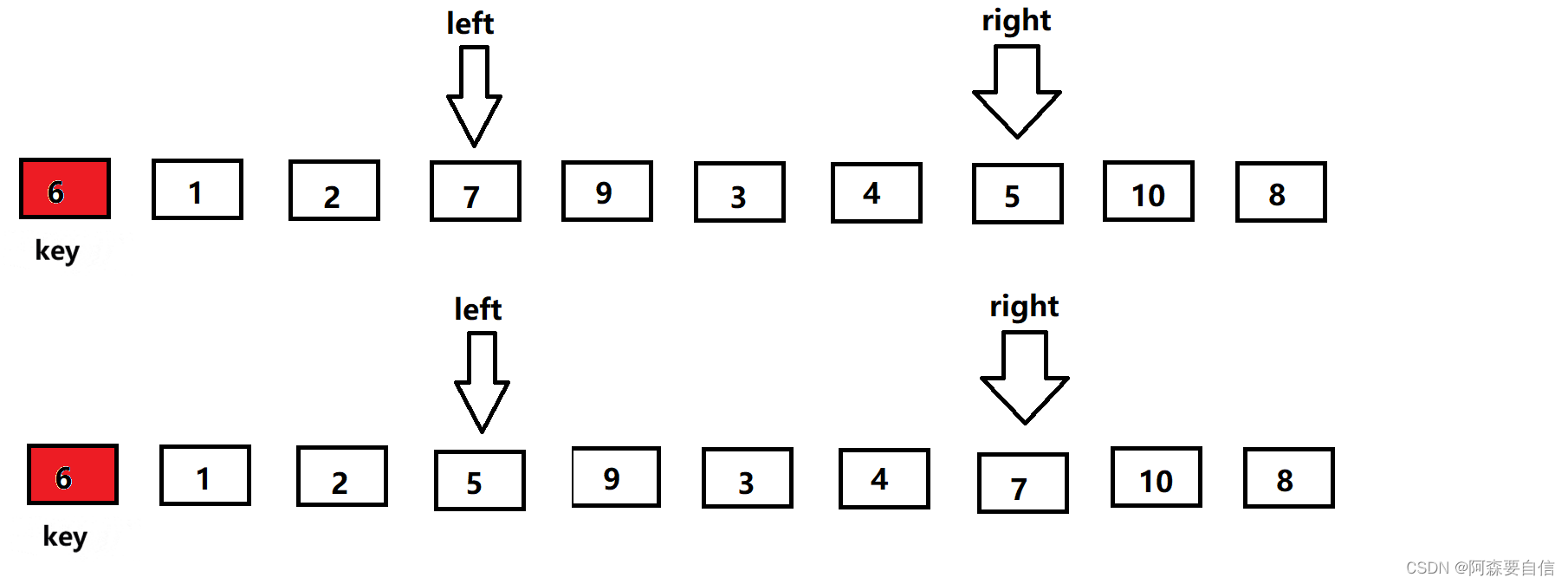
它通过选定一个基准数key(通常是第一个元素),然后利用双指针left和right的方式进行排序,right指针先找比key基准值小的数,left然后找比key基准值大的数,找到后将两个数交换位置,同时实现大数右移和小数左移,当left与right相遇就排序完成,然后将下标key的值与left交换,返回基准数key的下标,完成了单趟排序。这一过程使得基准数左侧的元素都比基准数小,右侧的元素都比基准数大。
如图动图展示:
以下是单趟排序的详解图解过程:
- begin和end记录区间的范围,left记录做下标,从左向右遍历,right记录右下标,从右向左遍历,以第一个数key作为基基准值
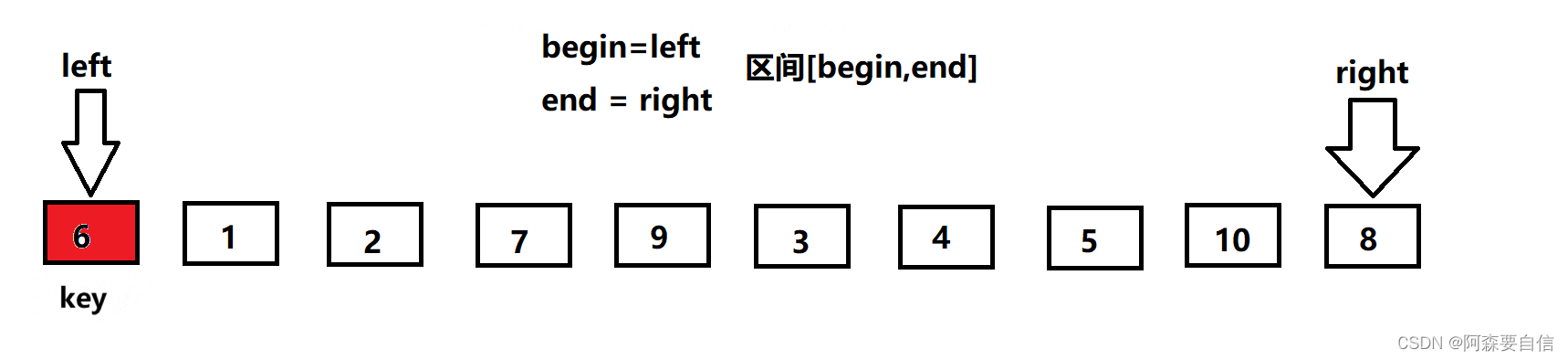
- 先让right出发,找比key值小的值,找到就停下来
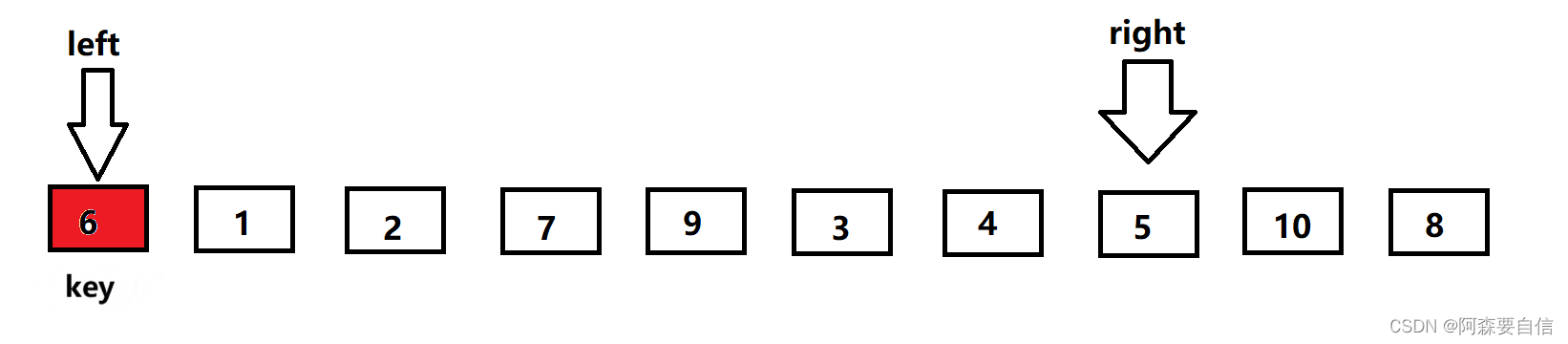
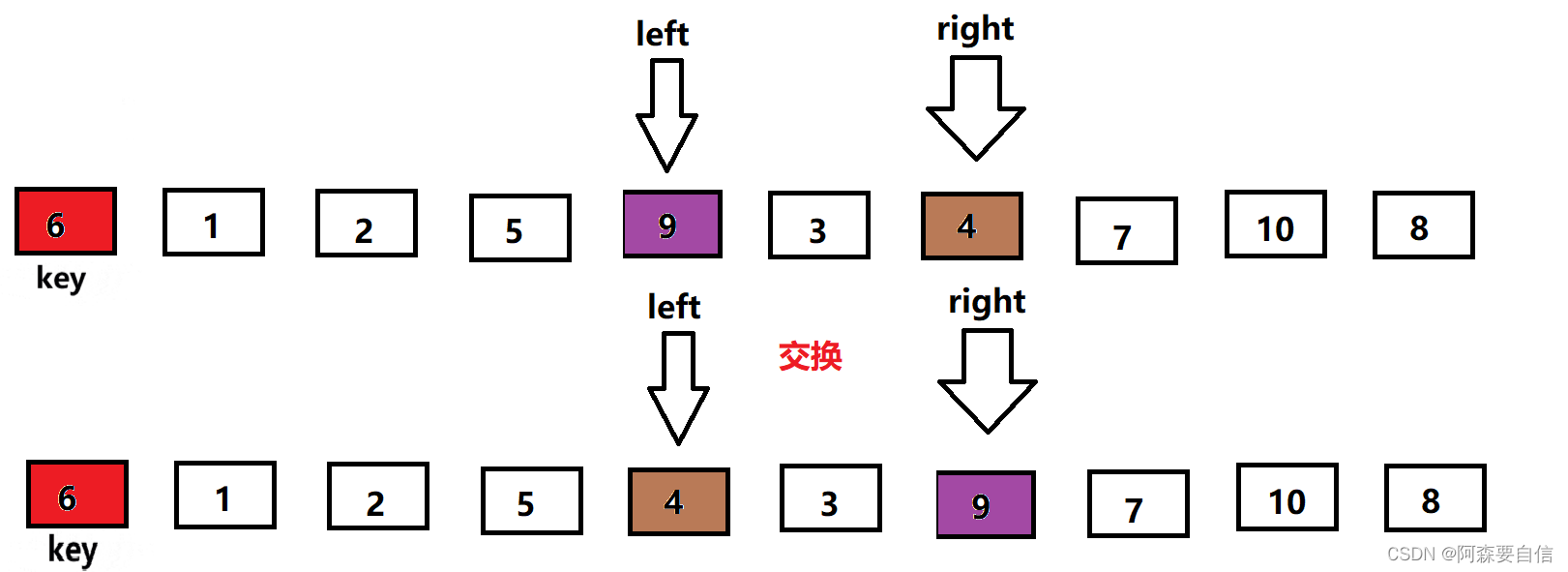
- 然后left再出发,找比key大的值,若是找到则停下来,与right的值进行交换
- 接着right继续找key小的值,找到后才让left找比key大的值,直到left相遇right,此时left会指向同一个数
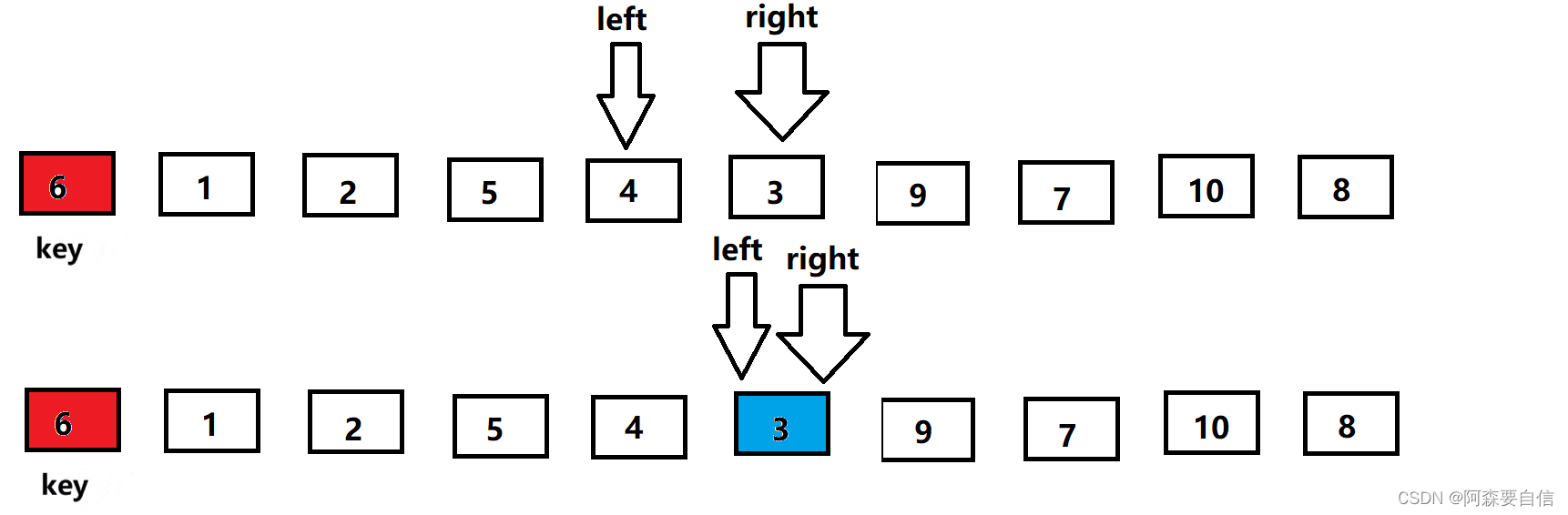
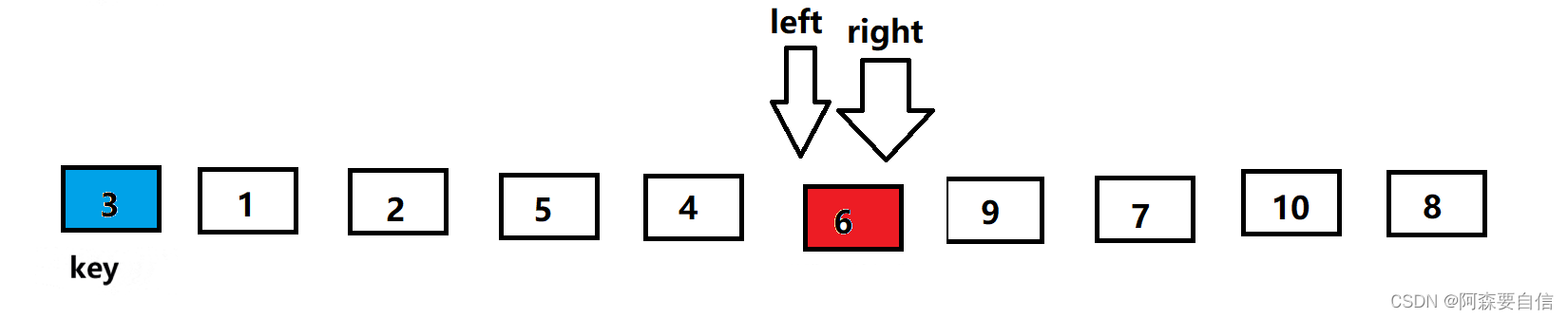
- 将left与right指向的数与key进行交换,单趟排序就完成了,最后将基准值的下标返回
为啥相遇位置比key要小->右边先走保证的
- L遇R: R先走,R在比key小的位置停下来了,L没有找到比key大的,就会跟R相遇相遇位置R停下的位置,是比key小的位置
- R遇L:第一轮以后的,先交换了,L位置的值小于key,R位置的值大于key ,R启动找小,没有找到,跟L相遇了,相遇位置L停下位置,这个位置比key小
- 第一轮R遇L,那么就是R没有找到小的,直接就一路左移,遇到L,也就是key的位置
代码实现
void Swap(int* px, int* py) { int tmp = *px; *px = *py; *py = tmp; } //Hoare经典随机快排 void QuickSort1(int* a, int left, int right) { // 如果左指针大于等于右指针,表示数组为空或只有一个元素,直接返回 if (left >= right) return; // 区间只有一个值或者不存在就是最小子问题 int begin = left, end = right;// begin和end记录原始整个区间 // keyi为基准值下标,初始化为左指针 int keyi = left; // 循环从left到right while (left取中的返回函数接收:
int begin = left, end = right; // 三数取中 int midi = GetMidi(a, left, right); //printf("%d\n", midi); Swap(&a[left], &a[midi]);整体函数实现:
//三数取中 left mid right //大小居中的值,也就是不是最大,也不是最小的 int GetMid(int* a, int left, int right) { int mid = (left + right) / 2; if (a[left] a[right]) { return left; } else { return right; } } else//a[left] > a[mid] { if (a[mid] > a[right]) { return mid; } else if (a[right] > a[left]) { return left; } else { return right; } } } void QuickSort4(int* a, int left, int right) { if (left >= right) return; int begin = left, end = right; //三数取中 int midi = GetMid(a, left, right); //printf("%d\n",midi); Swap(&a[left], &a[midi]); int keyi = left; while (left = a[keyi]) { --right; } while (left = a[keyi]) { --right; } while (left top = 0; ps->capacity = 0; } void STDestroy(ST* ps) { assert(ps); free(ps->a); ps->a = NULL; ps->top = ps->capacity = 0; } // 栈顶 void STPush(ST* ps, STDataType x) { assert(ps); // 满了, 扩容 if (ps->top == ps->capacity) { int newcapacity = ps->capacity == 0 ? 4 : ps->capacity * 2; STDataType* tmp = (STDataType*)realloc(ps->a, newcapacity * sizeof(STDataType)); if (tmp == NULL) { perror("realloc fail"); return; } ps->a = tmp; ps->capacity = newcapacity; } ps->a[ps->top] = x; ps->top++; } void STPop(ST* ps) { assert(ps); assert(!STEmpty(ps)); ps->top--; } STDataType STTop(ST* ps) { assert(ps); assert(!STEmpty(ps)); return ps->a[ps->top - 1]; } int STSize(ST* ps) { assert(ps); return ps->top; } bool STEmpty(ST* ps) { assert(ps); return ps->top == 0; }栈的头文件实现:
#pragma once #include #include #include #include typedef int STDataType; typedef struct Stack { STDataType* a; int top; int capacity; }ST; void STInit(ST* ps); void STDestroy(ST* ps); // 栈顶 void STPush(ST* ps, STDataType x); void STPop(ST* ps); STDataType STTop(ST* ps); int STSize(ST* ps); bool STEmpty(ST* ps);🚩总结
快速排序的特性总结:
- 快速排序整体的综合性能和使用场景都是比较好的,所以才敢叫快速排序
- 时间复杂度:O(N*logN)
- 空间复杂度:O(logN)
- 稳定性:不稳定
因此
时间复杂度:O(N*logN)
什么情况快排最坏:有序/接近有序 ->O(N^2)
但是如果加上随机选key或者三数取中选key,最坏情况不会出现,所以这里不看最坏
快排可以很快,你的点赞也可以很快,哈哈哈,感谢💓 💗 💕 💞,喜欢的话可以点个关注,也可以给博主点一个小小的赞😘呀

- begin和end记录区间的范围,left记录做下标,从左向右遍历,right记录右下标,从右向左遍历,以第一个数key作为基基准值
文章版权声明:除非注明,否则均为主机测评原创文章,转载或复制请以超链接形式并注明出处。





