
使用KITTI跑LIOSAM并完成EVO评价
一、kitti转ROS bag
1.1下载kitti数据集
其中kitti中的十个序列对应的raw data关系如下:
00: 2011_10_03_drive_0027 01: 2011_10_03_drive_0042 02: 2011_10_03_drive_0034 03: 2011_09_26_drive_0067 04: 2011_09_30_drive_0016 05: 2011_09_30_drive_0018 06: 2011_09_30_drive_0020 07: 2011_09_30_drive_0027 08: 2011_09_30_drive_0028 09: 2011_09_30_drive_0033 10: 2011_09_30_drive_0034
也就是意味着需要下载这几个数据集对应的,其中下载链接整理如下:
1)官网下载:KITTI,需要进行注册,比较麻烦。
2)百度云下载kitti数据集下载中的KITTI data_odometry_velodyne下载地址:百度云 密码:tc10,及大佬分享的文件
KITTI RAW 百度云盘,提取码:tsdp
找到数据集链接,接下来就是选择下载怎样的数据集:
1)任乾大佬的框架从零开始做自动驾驶定位(二): 数据集,下载*_sync.zip相关的数据集即可。
2)如果是LIO-SAM相关的算法,需要下载_extract.zip和_sync.zip两个部分**,这是因为*_extract.zip 包含的IMU数据是100Hz, 但是视觉的数据没有去畸变,此外激光数据是以txt格式存储的,在转换为bag格式的时候非常耗时.虽然*_sync.zip数据中的IMU是10Hz, 但是视觉数据已经去畸变了,并且视觉和激光的时间戳已经同步好了,激光数据的存储格式是二进制格式bin存储的。
1.2kitti数据转ros bag
1)*_extract.zip转化方式
使用官方的kitti2bag进行转换,具体操作方式如下:
A. 升级numpy
这一步很重要,不然后面运行会报错。kitti2bag要求numpy版本>=1.12,ubuntu 16.04默认的是1.11,升级可以通过一条指令来完成。
sudo pip install -U numpy
B. 安装kitti2bag
sudo pip install kitti2bag
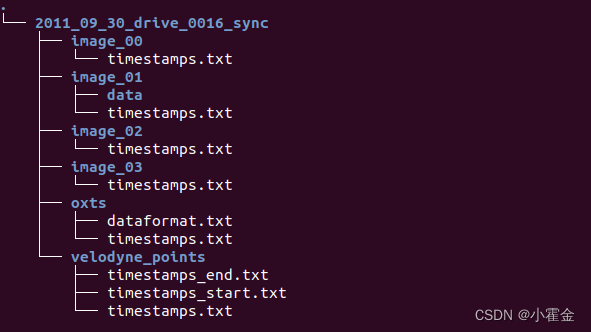
C.按照以下方式进行存储
D.运行
kitti2bag -t 2011_09_30 -r 0016 raw_synced
2)_extract.zip和_sync.zip
该种方式需要下载*_extract.zip对应的*_sync.zip,步骤与上述类似。
A.安装tpdm
pip3 install tqdm
B.下载kitti2bag.py
该文件是LIO-SAM作者提供的文件。
#!env python
# -*- coding: utf-8 -*-
import sys
try:
import pykitti
except ImportError as e:
print('Could not load module \'pykitti\'. Please run `pip install pykitti`')
sys.exit(1)
import tf
import os
import cv2
import rospy
import rosbag
from tqdm import tqdm
from tf2_msgs.msg import TFMessage
from datetime import datetime
from std_msgs.msg import Header
from sensor_msgs.msg import CameraInfo, Imu, PointField, NavSatFix
import sensor_msgs.point_cloud2 as pcl2
from geometry_msgs.msg import TransformStamped, TwistStamped, Transform
from cv_bridge import CvBridge
import numpy as np
import argparse
def save_imu_data(bag, kitti, imu_frame_id, topic):
print("Exporting IMU")
for timestamp, oxts in zip(kitti.timestamps, kitti.oxts):
q = tf.transformations.quaternion_from_euler(oxts.packet.roll, oxts.packet.pitch, oxts.packet.yaw)
imu = Imu()
imu.header.frame_id = imu_frame_id
imu.header.stamp = rospy.Time.from_sec(float(timestamp.strftime("%s.%f")))
imu.orientation.x = q[0]
imu.orientation.y = q[1]
imu.orientation.z = q[2]
imu.orientation.w = q[3]
imu.linear_acceleration.x = oxts.packet.af
imu.linear_acceleration.y = oxts.packet.al
imu.linear_acceleration.z = oxts.packet.au
imu.angular_velocity.x = oxts.packet.wf
imu.angular_velocity.y = oxts.packet.wl
imu.angular_velocity.z = oxts.packet.wu
bag.write(topic, imu, t=imu.header.stamp)
def save_imu_data_raw(bag, kitti, imu_frame_id, topic):
print("Exporting IMU Raw")
synced_path = kitti.data_path
unsynced_path = synced_path.replace('sync', 'extract')
imu_path = os.path.join(unsynced_path, 'oxts')
# read time stamp (convert to ros seconds format)
with open(os.path.join(imu_path, 'timestamps.txt')) as f:
lines = f.readlines()
imu_datetimes = []
for line in lines:
if len(line) == 1:
continue
timestamp = datetime.strptime(line[:-4], '%Y-%m-%d %H:%M:%S.%f')
imu_datetimes.append(float(timestamp.strftime("%s.%f")))
# fix imu time using a linear model (may not be ideal, ^_^)
imu_index = np.asarray(range(len(imu_datetimes)), dtype=np.float64)
z = np.polyfit(imu_index, imu_datetimes, 1)
imu_datetimes_new = z[0] * imu_index + z[1]
imu_datetimes = imu_datetimes_new.tolist()
# get all imu data
imu_data_dir = os.path.join(imu_path, 'data')
imu_filenames = sorted(os.listdir(imu_data_dir))
imu_data = [None] * len(imu_filenames)
for i, imu_file in enumerate(imu_filenames):
imu_data_file = open(os.path.join(imu_data_dir, imu_file), "r")
for line in imu_data_file:
if len(line) == 1:
continue
stripped_line = line.strip()
line_list = stripped_line.split()
imu_data[i] = line_list
assert len(imu_datetimes) == len(imu_data)
for timestamp, data in zip(imu_datetimes, imu_data):
roll, pitch, yaw = float(data[3]), float(data[4]), float(data[5]),
q = tf.transformations.quaternion_from_euler(roll, pitch, yaw)
imu = Imu()
imu.header.frame_id = imu_frame_id
imu.header.stamp = rospy.Time.from_sec(timestamp)
imu.orientation.x = q[0]
imu.orientation.y = q[1]
imu.orientation.z = q[2]
imu.orientation.w = q[3]
imu.linear_acceleration.x = float(data[11])
imu.linear_acceleration.y = float(data[12])
imu.linear_acceleration.z = float(data[13])
imu.angular_velocity.x = float(data[17])
imu.angular_velocity.y = float(data[18])
imu.angular_velocity.z = float(data[19])
bag.write(topic, imu, t=imu.header.stamp)
imu.header.frame_id = 'imu_enu_link'
bag.write('/imu_correct', imu, t=imu.header.stamp) # for LIO-SAM GPS
def save_dynamic_tf(bag, kitti, kitti_type, initial_time):
print("Exporting time dependent transformations")
if kitti_type.find("raw") != -1:
for timestamp, oxts in zip(kitti.timestamps, kitti.oxts):
tf_oxts_msg = TFMessage()
tf_oxts_transform = TransformStamped()
tf_oxts_transform.header.stamp = rospy.Time.from_sec(float(timestamp.strftime("%s.%f")))
tf_oxts_transform.header.frame_id = 'world'
tf_oxts_transform.child_frame_id = 'base_link'
transform = (oxts.T_w_imu)
t = transform[0:3, 3]
q = tf.transformations.quaternion_from_matrix(transform)
oxts_tf = Transform()
oxts_tf.translation.x = t[0]
oxts_tf.translation.y = t[1]
oxts_tf.translation.z = t[2]
oxts_tf.rotation.x = q[0]
oxts_tf.rotation.y = q[1]
oxts_tf.rotation.z = q[2]
oxts_tf.rotation.w = q[3]
tf_oxts_transform.transform = oxts_tf
tf_oxts_msg.transforms.append(tf_oxts_transform)
bag.write('/tf', tf_oxts_msg, tf_oxts_msg.transforms[0].header.stamp)
elif kitti_type.find("odom") != -1:
timestamps = map(lambda x: initial_time + x.total_seconds(), kitti.timestamps)
for timestamp, tf_matrix in zip(timestamps, kitti.T_w_cam0):
tf_msg = TFMessage()
tf_stamped = TransformStamped()
tf_stamped.header.stamp = rospy.Time.from_sec(timestamp)
tf_stamped.header.frame_id = 'world'
tf_stamped.child_frame_id = 'camera_left'
t = tf_matrix[0:3, 3]
q = tf.transformations.quaternion_from_matrix(tf_matrix)
transform = Transform()
transform.translation.x = t[0]
transform.translation.y = t[1]
transform.translation.z = t[2]
transform.rotation.x = q[0]
transform.rotation.y = q[1]
transform.rotation.z = q[2]
transform.rotation.w = q[3]
tf_stamped.transform = transform
tf_msg.transforms.append(tf_stamped)
bag.write('/tf', tf_msg, tf_msg.transforms[0].header.stamp)
def save_camera_data(bag, kitti_type, kitti, util, bridge, camera, camera_frame_id, topic, initial_time):
print("Exporting camera {}".format(camera))
if kitti_type.find("raw") != -1:
camera_pad = '{0:02d}'.format(camera)
image_dir = os.path.join(kitti.data_path, 'image_{}'.format(camera_pad))
image_path = os.path.join(image_dir, 'data')
image_filenames = sorted(os.listdir(image_path))
with open(os.path.join(image_dir, 'timestamps.txt')) as f:
image_datetimes = map(lambda x: datetime.strptime(x[:-4], '%Y-%m-%d %H:%M:%S.%f'), f.readlines())
calib = CameraInfo()
calib.header.frame_id = camera_frame_id
calib.width, calib.height = tuple(util['S_rect_{}'.format(camera_pad)].tolist())
calib.distortion_model = 'plumb_bob'
calib.K = util['K_{}'.format(camera_pad)]
calib.R = util['R_rect_{}'.format(camera_pad)]
calib.D = util['D_{}'.format(camera_pad)]
calib.P = util['P_rect_{}'.format(camera_pad)]
elif kitti_type.find("odom") != -1:
camera_pad = '{0:01d}'.format(camera)
image_path = os.path.join(kitti.sequence_path, 'image_{}'.format(camera_pad))
image_filenames = sorted(os.listdir(image_path))
image_datetimes = map(lambda x: initial_time + x.total_seconds(), kitti.timestamps)
calib = CameraInfo()
calib.header.frame_id = camera_frame_id
calib.P = util['P{}'.format(camera_pad)]
iterable = zip(image_datetimes, image_filenames)
for dt, filename in tqdm(iterable, total=len(image_filenames)):
image_filename = os.path.join(image_path, filename)
cv_image = cv2.imread(image_filename)
calib.height, calib.width = cv_image.shape[:2]
if camera in (0, 1):
cv_image = cv2.cvtColor(cv_image, cv2.COLOR_BGR2GRAY)
encoding = "mono8" if camera in (0, 1) else "bgr8"
image_message = bridge.cv2_to_imgmsg(cv_image, encoding=encoding)
image_message.header.frame_id = camera_frame_id
if kitti_type.find("raw") != -1:
image_message.header.stamp = rospy.Time.from_sec(float(datetime.strftime(dt, "%s.%f")))
topic_ext = "/image_raw"
elif kitti_type.find("odom") != -1:
image_message.header.stamp = rospy.Time.from_sec(dt)
topic_ext = "/image_rect"
calib.header.stamp = image_message.header.stamp
bag.write(topic + topic_ext, image_message, t = image_message.header.stamp)
bag.write(topic + '/camera_info', calib, t = calib.header.stamp)
def save_velo_data(bag, kitti, velo_frame_id, topic):
print("Exporting velodyne data")
velo_path = os.path.join(kitti.data_path, 'velodyne_points')
velo_data_dir = os.path.join(velo_path, 'data')
velo_filenames = sorted(os.listdir(velo_data_dir))
with open(os.path.join(velo_path, 'timestamps.txt')) as f:
lines = f.readlines()
velo_datetimes = []
for line in lines:
if len(line) == 1:
continue
dt = datetime.strptime(line[:-4], '%Y-%m-%d %H:%M:%S.%f')
velo_datetimes.append(dt)
iterable = zip(velo_datetimes, velo_filenames)
count = 0
for dt, filename in tqdm(iterable, total=len(velo_filenames)):
if dt is None:
continue
velo_filename = os.path.join(velo_data_dir, filename)
# read binary data
scan = (np.fromfile(velo_filename, dtype=np.float32)).reshape(-1, 4)
# get ring channel
depth = np.linalg.norm(scan, 2, axis=1)
pitch = np.arcsin(scan[:, 2] / depth) # arcsin(z, depth)
fov_down = -24.8 / 180.0 * np.pi
fov = (abs(-24.8) + abs(2.0)) / 180.0 * np.pi
proj_y = (pitch + abs(fov_down)) / fov # in [0.0, 1.0]
proj_y *= 64 # in [0.0, H]
proj_y = np.floor(proj_y)
proj_y = np.minimum(64 - 1, proj_y)
proj_y = np.maximum(0, proj_y).astype(np.int32) # in [0,H-1]
proj_y = proj_y.reshape(-1, 1)
scan = np.concatenate((scan,proj_y), axis=1)
scan = scan.tolist()
for i in range(len(scan)):
scan[i][-1] = int(scan[i][-1])
# create header
header = Header()
header.frame_id = velo_frame_id
header.stamp = rospy.Time.from_sec(float(datetime.strftime(dt, "%s.%f")))
# fill pcl msg
fields = [PointField('x', 0, PointField.FLOAT32, 1),
PointField('y', 4, PointField.FLOAT32, 1),
PointField('z', 8, PointField.FLOAT32, 1),
PointField('intensity', 12, PointField.FLOAT32, 1),
PointField('ring', 16, PointField.UINT16, 1)]
pcl_msg = pcl2.create_cloud(header, fields, scan)
pcl_msg.is_dense = True
# print(pcl_msg)
bag.write(topic, pcl_msg, t=pcl_msg.header.stamp)
# count += 1
# if count > 200:
# break
def get_static_transform(from_frame_id, to_frame_id, transform):
t = transform[0:3, 3]
q = tf.transformations.quaternion_from_matrix(transform)
tf_msg = TransformStamped()
tf_msg.header.frame_id = from_frame_id
tf_msg.child_frame_id = to_frame_id
tf_msg.transform.translation.x = float(t[0])
tf_msg.transform.translation.y = float(t[1])
tf_msg.transform.translation.z = float(t[2])
tf_msg.transform.rotation.x = float(q[0])
tf_msg.transform.rotation.y = float(q[1])
tf_msg.transform.rotation.z = float(q[2])
tf_msg.transform.rotation.w = float(q[3])
return tf_msg
def inv(transform):
"Invert rigid body transformation matrix"
R = transform[0:3, 0:3]
t = transform[0:3, 3]
t_inv = -1 * R.T.dot(t)
transform_inv = np.eye(4)
transform_inv[0:3, 0:3] = R.T
transform_inv[0:3, 3] = t_inv
return transform_inv
def save_static_transforms(bag, transforms, timestamps):
print("Exporting static transformations")
tfm = TFMessage()
for transform in transforms:
t = get_static_transform(from_frame_id=transform[0], to_frame_id=transform[1], transform=transform[2])
tfm.transforms.append(t)
for timestamp in timestamps:
time = rospy.Time.from_sec(float(timestamp.strftime("%s.%f")))
for i in range(len(tfm.transforms)):
tfm.transforms[i].header.stamp = time
bag.write('/tf_static', tfm, t=time)
def save_gps_fix_data(bag, kitti, gps_frame_id, topic):
for timestamp, oxts in zip(kitti.timestamps, kitti.oxts):
navsatfix_msg = NavSatFix()
navsatfix_msg.header.frame_id = gps_frame_id
navsatfix_msg.header.stamp = rospy.Time.from_sec(float(timestamp.strftime("%s.%f")))
navsatfix_msg.latitude = oxts.packet.lat
navsatfix_msg.longitude = oxts.packet.lon
navsatfix_msg.altitude = oxts.packet.alt
navsatfix_msg.status.service = 1
bag.write(topic, navsatfix_msg, t=navsatfix_msg.header.stamp)
def save_gps_vel_data(bag, kitti, gps_frame_id, topic):
for timestamp, oxts in zip(kitti.timestamps, kitti.oxts):
twist_msg = TwistStamped()
twist_msg.header.frame_id = gps_frame_id
twist_msg.header.stamp = rospy.Time.from_sec(float(timestamp.strftime("%s.%f")))
twist_msg.twist.linear.x = oxts.packet.vf
twist_msg.twist.linear.y = oxts.packet.vl
twist_msg.twist.linear.z = oxts.packet.vu
twist_msg.twist.angular.x = oxts.packet.wf
twist_msg.twist.angular.y = oxts.packet.wl
twist_msg.twist.angular.z = oxts.packet.wu
bag.write(topic, twist_msg, t=twist_msg.header.stamp)
if __name__ == "__main__":
parser = argparse.ArgumentParser(description = "Convert KITTI dataset to ROS bag file the easy way!")
# Accepted argument values
kitti_types = ["raw_synced", "odom_color", "odom_gray"]
odometry_sequences = []
for s in range(22):
odometry_sequences.append(str(s).zfill(2))
parser.add_argument("kitti_type", choices = kitti_types, help = "KITTI dataset type")
parser.add_argument("dir", nargs = "?", default = os.getcwd(), help = "base directory of the dataset, if no directory passed the deafult is current working directory")
parser.add_argument("-t", "--date", help = "date of the raw dataset (i.e. 2011_09_26), option is only for RAW datasets.")
parser.add_argument("-r", "--drive", help = "drive number of the raw dataset (i.e. 0001), option is only for RAW datasets.")
parser.add_argument("-s", "--sequence", choices = odometry_sequences,help = "sequence of the odometry dataset (between 00 - 21), option is only for ODOMETRY datasets.")
args = parser.parse_args()
bridge = CvBridge()
compression = rosbag.Compression.NONE
# compression = rosbag.Compression.BZ2
# compression = rosbag.Compression.LZ4
# CAMERAS
cameras = [
(0, 'camera_gray_left', '/kitti/camera_gray_left'),
(1, 'camera_gray_right', '/kitti/camera_gray_right'),
(2, 'camera_color_left', '/kitti/camera_color_left'),
(3, 'camera_color_right', '/kitti/camera_color_right')
]
if args.kitti_type.find("raw") != -1:
if args.date == None:
print("Date option is not given. It is mandatory for raw dataset.")
print("Usage for raw dataset: kitti2bag raw_synced [dir] -t -r ")
sys.exit(1)
elif args.drive == None:
print("Drive option is not given. It is mandatory for raw dataset.")
print("Usage for raw dataset: kitti2bag raw_synced [dir] -t -r ")
sys.exit(1)
bag = rosbag.Bag("kitti_{}_drive_{}_{}.bag".format(args.date, args.drive, args.kitti_type[4:]), 'w', compression=compression)
kitti = pykitti.raw(args.dir, args.date, args.drive)
if not os.path.exists(kitti.data_path):
print('Path {} does not exists. Exiting.'.format(kitti.data_path))
sys.exit(1)
if len(kitti.timestamps) == 0:
print('Dataset is empty? Exiting.')
sys.exit(1)
try:
# IMU
imu_frame_id = 'imu_link'
imu_topic = '/kitti/oxts/imu'
imu_raw_topic = '/imu_raw'
gps_fix_topic = '/gps/fix'
gps_vel_topic = '/gps/vel'
velo_frame_id = 'velodyne'
velo_topic = '/points_raw'
T_base_link_to_imu = np.eye(4, 4)
T_base_link_to_imu[0:3, 3] = [-2.71/2.0-0.05, 0.32, 0.93]
# tf_static
transforms = [
('base_link', imu_frame_id, T_base_link_to_imu),
(imu_frame_id, velo_frame_id, inv(kitti.calib.T_velo_imu)),
(imu_frame_id, cameras[0][1], inv(kitti.calib.T_cam0_imu)),
(imu_frame_id, cameras[1][1], inv(kitti.calib.T_cam1_imu)),
(imu_frame_id, cameras[2][1], inv(kitti.calib.T_cam2_imu)),
(imu_frame_id, cameras[3][1], inv(kitti.calib.T_cam3_imu))
]
util = pykitti.utils.read_calib_file(os.path.join(kitti.calib_path, 'calib_cam_to_cam.txt'))
# Export
# save_static_transforms(bag, transforms, kitti.timestamps)
# save_dynamic_tf(bag, kitti, args.kitti_type, initial_time=None)
# save_imu_data(bag, kitti, imu_frame_id, imu_topic)
save_imu_data_raw(bag, kitti, imu_frame_id, imu_raw_topic)
save_gps_fix_data(bag, kitti, imu_frame_id, gps_fix_topic)
save_gps_vel_data(bag, kitti, imu_frame_id, gps_vel_topic)
for camera in cameras:
save_camera_data(bag, args.kitti_type, kitti, util, bridge, camera=camera[0], camera_frame_id=camera[1], topic=camera[2], initial_time=None)
break
save_velo_data(bag, kitti, velo_frame_id, velo_topic)
finally:
print("## OVERVIEW ##")
print(bag)
bag.close()
elif args.kitti_type.find("odom") != -1:
if args.sequence == None:
print("Sequence option is not given. It is mandatory for odometry dataset.")
print("Usage for odometry dataset: kitti2bag {odom_color, odom_gray} [dir] -s ")
sys.exit(1)
bag = rosbag.Bag("kitti_data_odometry_{}_sequence_{}.bag".format(args.kitti_type[5:],args.sequence), 'w', compression=compression)
kitti = pykitti.odometry(args.dir, args.sequence)
if not os.path.exists(kitti.sequence_path):
print('Path {} does not exists. Exiting.'.format(kitti.sequence_path))
sys.exit(1)
kitti.load_calib()
kitti.load_timestamps()
if len(kitti.timestamps) == 0:
print('Dataset is empty? Exiting.')
sys.exit(1)
if args.sequence in odometry_sequences[:11]:
print("Odometry dataset sequence {} has ground truth information (poses).".format(args.sequence))
kitti.load_poses()
try:
util = pykitti.utils.read_calib_file(os.path.join(args.dir,'sequences',args.sequence, 'calib.txt'))
current_epoch = (datetime.utcnow() - datetime(1970, 1, 1)).total_seconds()
# Export
if args.kitti_type.find("gray") != -1:
used_cameras = cameras[:2]
elif args.kitti_type.find("color") != -1:
used_cameras = cameras[-2:]
save_dynamic_tf(bag, kitti, args.kitti_type, initial_time=current_epoch)
for camera in used_cameras:
save_camera_data(bag, args.kitti_type, kitti, util, bridge, camera=camera[0], camera_frame_id=camera[1], topic=camera[2], initial_time=current_epoch)
finally:
print("## OVERVIEW ##")
print(bag)
bag.close()
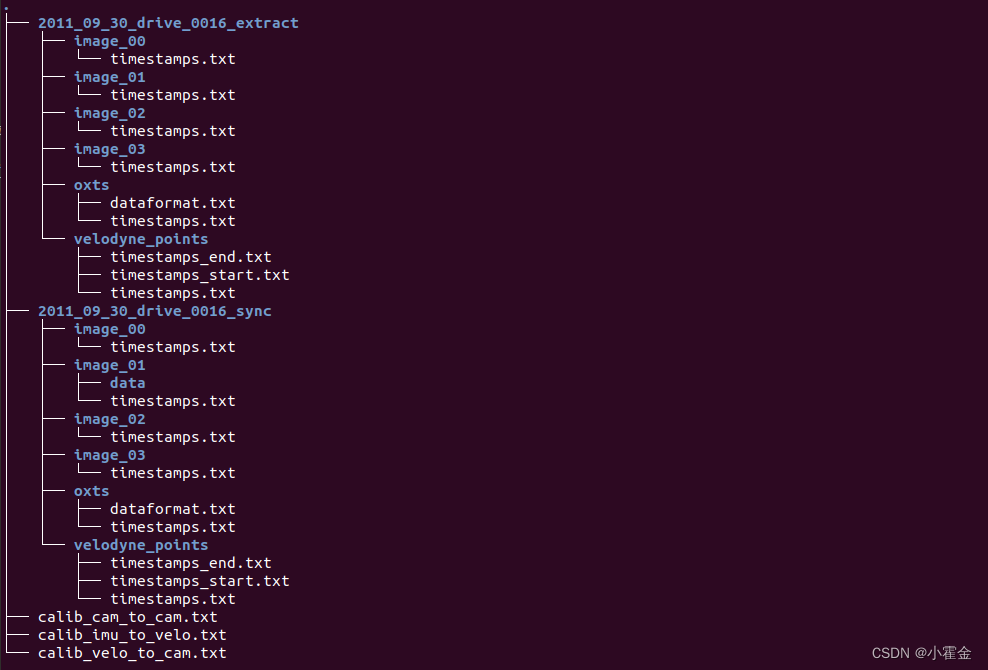
C. 建立文件夹结构
D. 运行
在上一级文件夹运行
python3 kitti2bag.py -t 2011_09_30 -r 0016 raw_synced
结果可以看到
二、LIO SAM源码改编
这部分参考LOAM、Lego-liom、Lio-sam轨迹保存,与Kitti数据集真值进行评估和在Ubuntu20.04系统上LIO-SAM跑KITTI数据集和自己数据集代码修改。
改编原因:
1.因为LIO-SAM 要求输入的点云每个点都有ring 信息和相对时间time信息,目前的雷达驱动基本具备这些信息,但是早期的KITTI数据集不具备,所以代码要自己计算一下 ring和time;
2.因为EVO评价需要kitti或tum格式数据,因此需要改正激光里程计算输出未tum格式。
具体修改如下:
2.1加入ring和time
int rowIdn = -1;
if (has_ring == true){
rowIdn = laserCloudIn->points[i].ring;
}
else{
float verticalAngle, horizonAngle;
verticalAngle = atan2(thisPoint.z, sqrt(thisPoint.x * thisPoint.x + thisPoint.y * thisPoint.y)) * 180 / M_PI;
rowIdn = (verticalAngle + ang_bottom) / ang_res_y;
}
if (rowIdn = N_SCAN)
continue;
if (rowIdn % downsampleRate != 0)
continue;
int columnIdn = -1;
if (sensor == SensorType::VELODYNE || sensor == SensorType::OUSTER)
{
float horizonAngle = atan2(thisPoint.x, thisPoint.y) * 180 / M_PI;
static float ang_res_x = 360.0/float(Horizon_SCAN);
columnIdn = -round((horizonAngle-90.0)/ang_res_x) + Horizon_SCAN/2;
if (columnIdn >= Horizon_SCAN)
columnIdn -= Horizon_SCAN;
}
else if (sensor == SensorType::LIVOX)
{
columnIdn = columnIdnCountVec[rowIdn];
columnIdnCountVec[rowIdn] += 1;
}
if (columnIdn = Horizon_SCAN)
continue;
if (rangeMat.at(rowIdn, columnIdn) != FLT_MAX)
continue;
if (has_ring == true)
thisPoint = deskewPoint(&thisPoint, laserCloudIn->points[i].time);
else {
float ori = -atan2(thisPoint.y, thisPoint.x);
if (!halfPassed) {
if (ori cloudInfo.startOrientation + M_PI * 3 / 2) {
ori -= 2 * M_PI;
}
if (ori - cloudInfo.startOrientation > M_PI) {
halfPassed = true;
}
} else {
ori += 2 * M_PI;
if (ori cloudInfo.endOrientation + M_PI / 2) {
ori -= 2 * M_PI;
}
}
float relTime = (ori - cloudInfo.startOrientation) / cloudInfo.orientationDiff;
// 激光雷达10Hz,周期0.1
laserCloudIn->points[i].time = 0.1 * relTime;
thisPoint = deskewPoint(&thisPoint, laserCloudIn->points[i].time);
}
2.2输出tum格式的激光里程计数据
// 位姿输出到txt文档
std::ofstream pose2("zz/pose2.txt", std::ios::app);
pose2.setf(std::ios::scientific, std::ios::floatfield);
// pose1.precision(15);
//save final trajectory in the left camera coordinate system.
Eigen::Matrix3d rotation_matrix;
rotation_matrix = Eigen::AngleAxisd(pose_in.yaw, Eigen::Vector3d::UnitZ()) *
Eigen::AngleAxisd(pose_in.pitch, Eigen::Vector3d::UnitY()) *
Eigen::AngleAxisd(pose_in.roll, Eigen::Vector3d::UnitX());
Eigen::Matrix mylio_pose;
mylio_pose.topLeftCorner(3,3) = rotation_matrix;
mylio_pose(0,3) = pose_in.x;
mylio_pose(1,3) = pose_in.y;
mylio_pose(2,3) = pose_in.z;
Eigen::Matrix cali_paremeter;
/*cali_paremeter 


