
opencv--使用直方图找谷底进行确定分割阈值



直方图原理就不说了,大家自行百度
直方图可以帮助分析图像中的灰度变化,进而帮助确定最优二值化的灰度阈值(threshold level)。如果物体与背景的灰度值对比明显,此时灰度直方图就会包含双峰(bimodal histogram),即直方图中一般会有两个峰值,分别为图像的前景和背景。
前景使得某个灰度区间的灰度值的数量急剧增加,就会产生一个峰值,同理背景会使另一个灰度区间的灰度值的数量急剧增加,就产生另外一个峰值,两峰间的谷底对应于物体边缘附近相对较少数目的像素点。
这两个峰值之间的最小值一般就是最优二值化的分界点,通过这个分界点可以把前景和背景很好地分割开来。
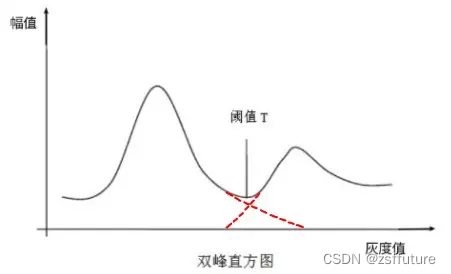
有时这两个峰值会有部分重叠,即左侧峰值的下降部分和右侧峰值的上升部分存在叠加。通常可以把自然界的信号看做高斯信号,即一个峰值对应一个高斯信号,当直方图中的两个高斯信号在某个灰度区域叠加的时候,其叠加区就形成了一个圆滑的谷底,就很难找到一个确切的位置(最优二值化的灰度值)把这两个峰值分开。
float calculateThreshold(cv::Mat& img)
{
cv::Mat temp = img.clone();
// 计算直方图
cv::Mat hist;
int histSize = 256; // 直方图尺寸
float range[] = { 0, 256 }; // 像素值范围
const float* ranges[] = { range };
cv::calcHist(&img, 1, nullptr, cv::Mat(), hist, 1, &histSize, ranges);
/*for (int i = 0; i nextValue && currentValue>0.005)) {
std::cout
文章版权声明:除非注明,否则均为主机测评原创文章,转载或复制请以超链接形式并注明出处。



